- (HSR)Cleanup Task
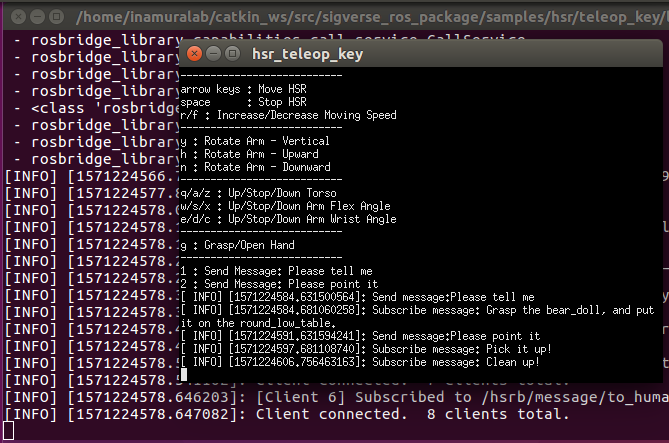
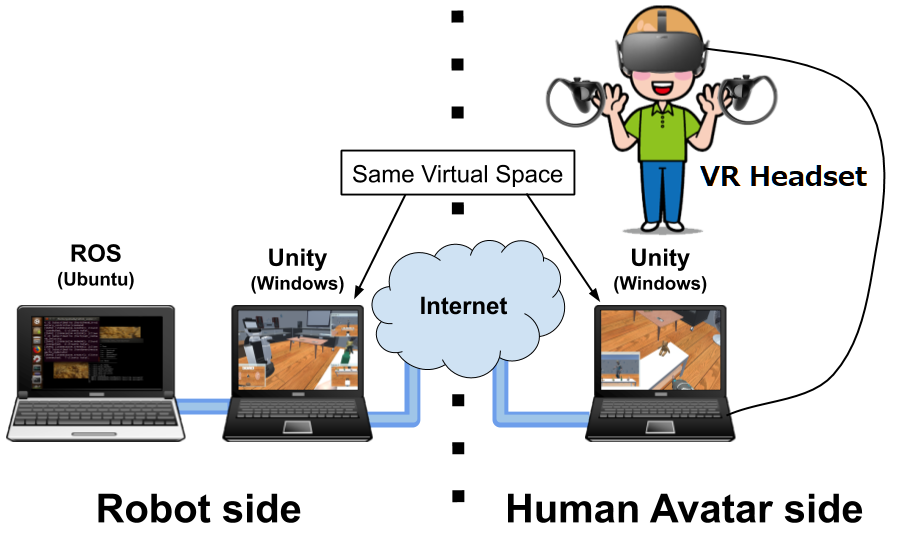
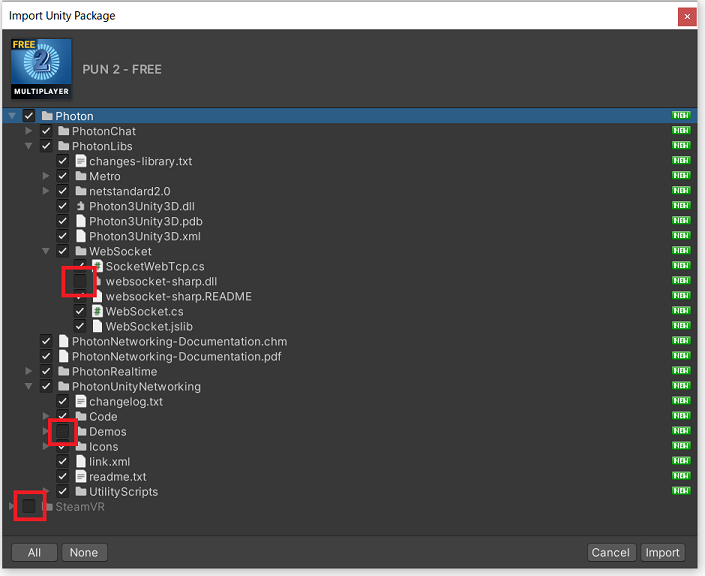
- (HSR)Cleanup Task using Cloud and VR
- (HSR)Cleanup Task using Cloud and VR with Playback function
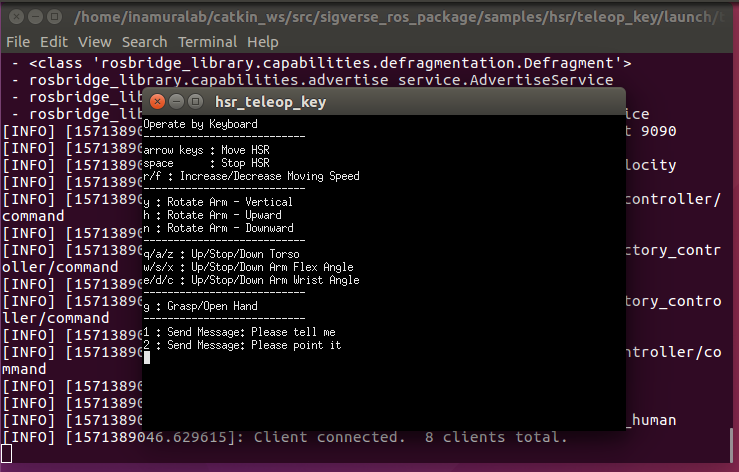
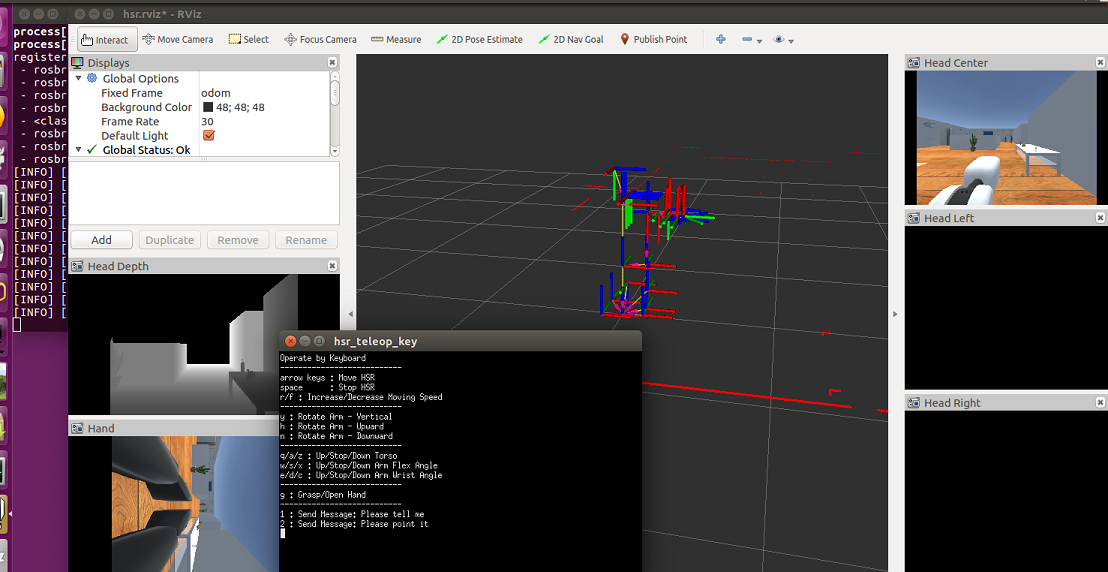
- (HSR)Operate with Keyboard
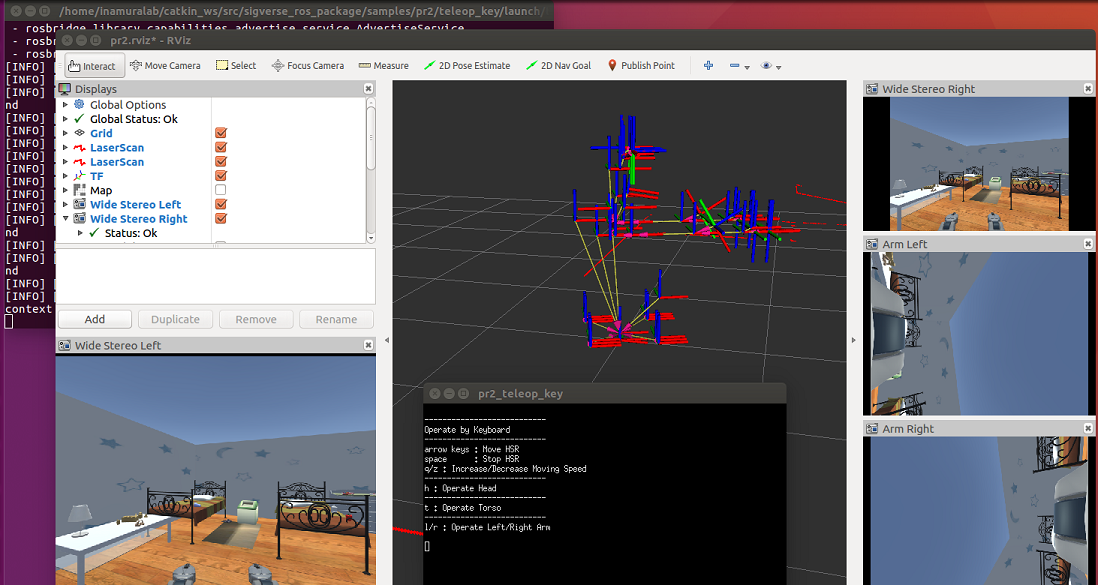
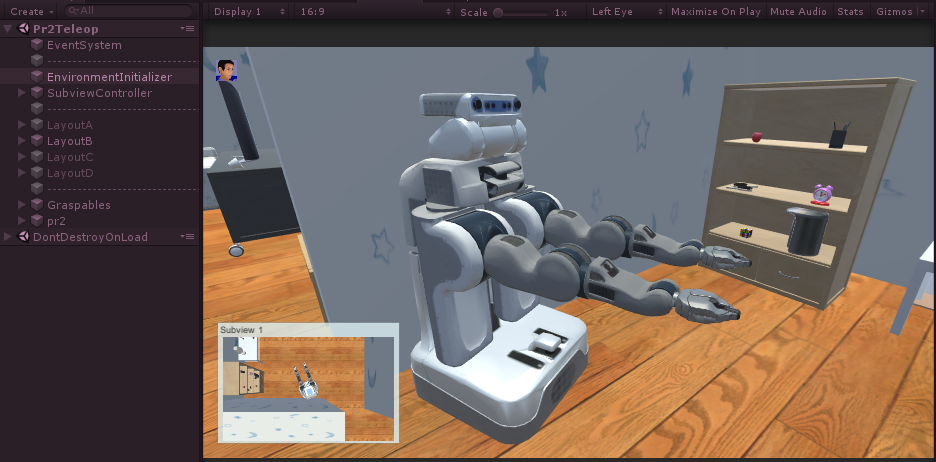
- (PR2)Operate with Keyboard
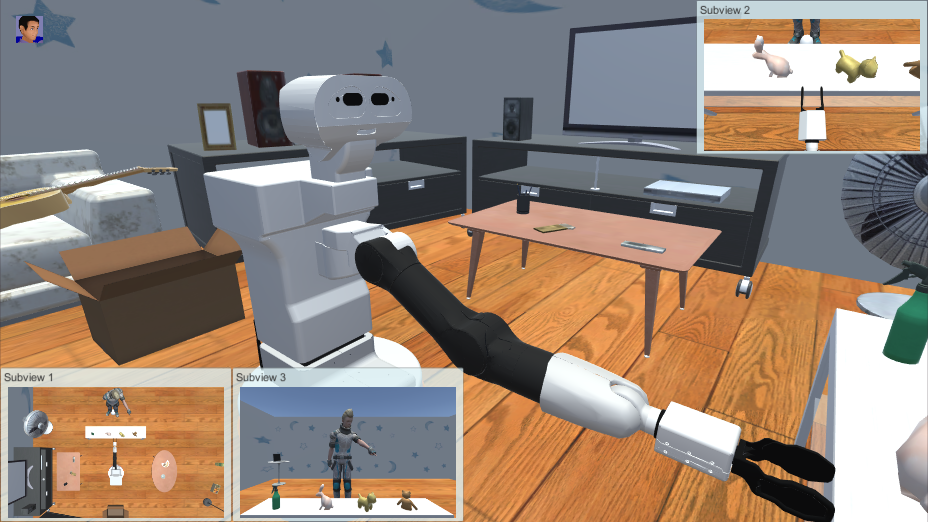
- (TIAGo)Cleanup Task
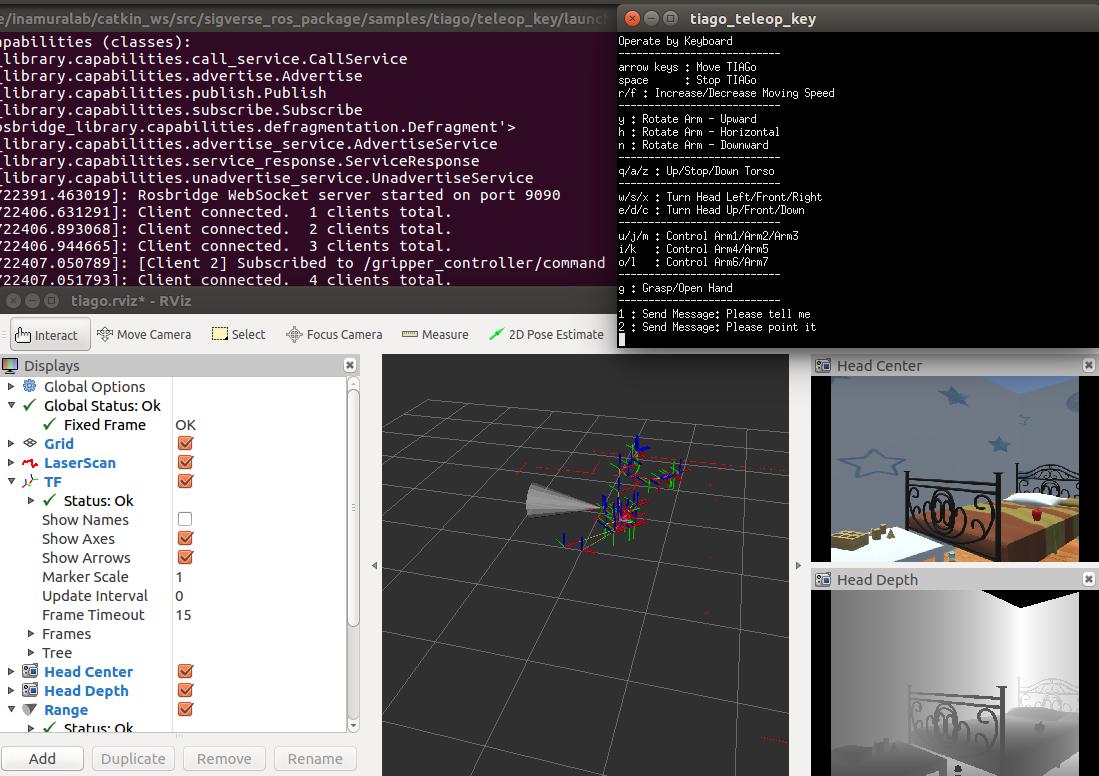
- (TIAGo)Operate with Keyboard
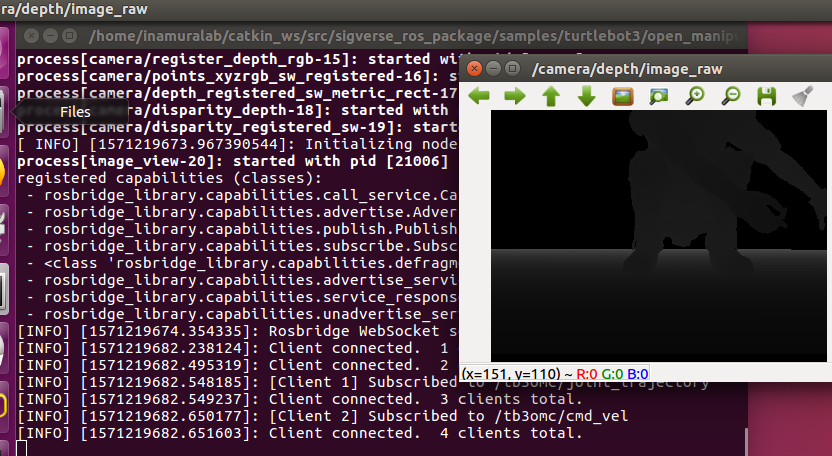
- (TurtleBot3)Grasp Automatically
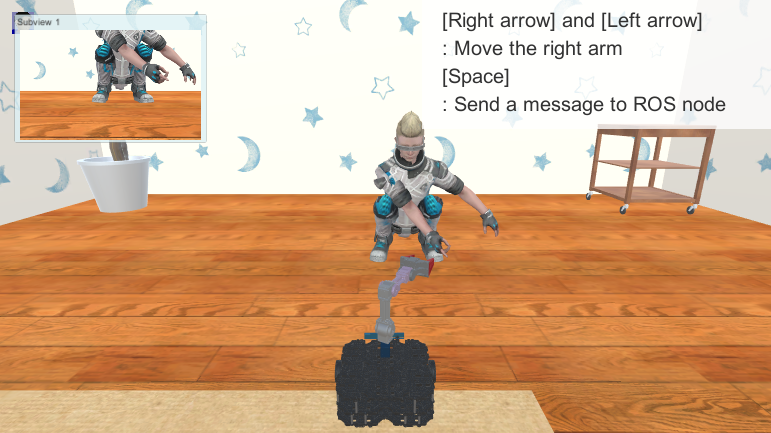
- (TurtleBot3)Grasp by Keyboard Operation
- (TurtleBot3)Recognize Human Pointing
- (TurtleBot3)SLAM
- (Turtlebot2)Follower
- (Turtlebot2)Operate with Keyboard
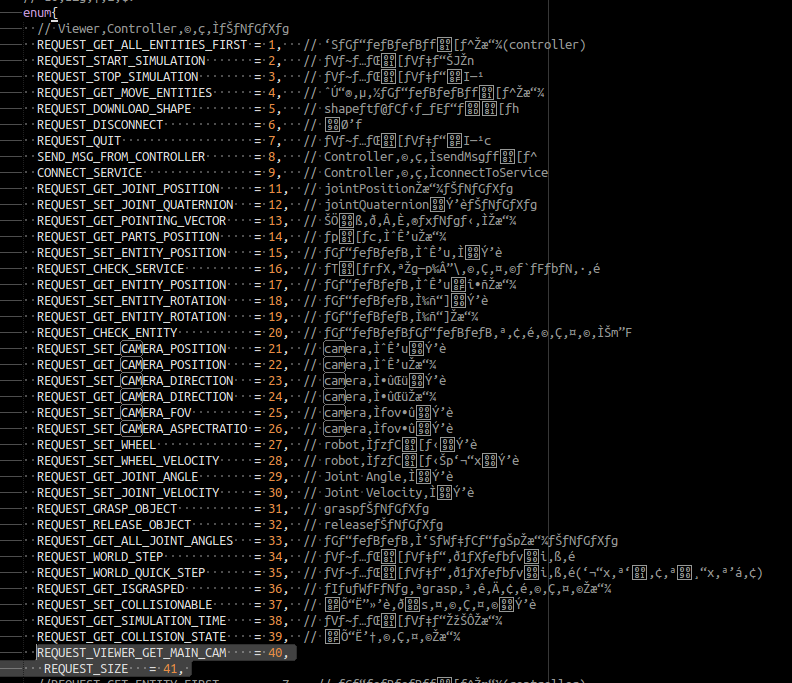
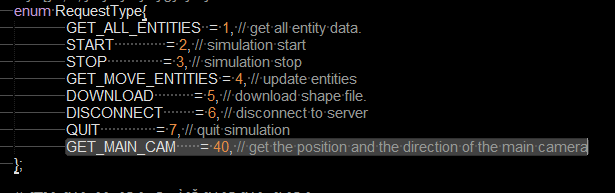
- API List
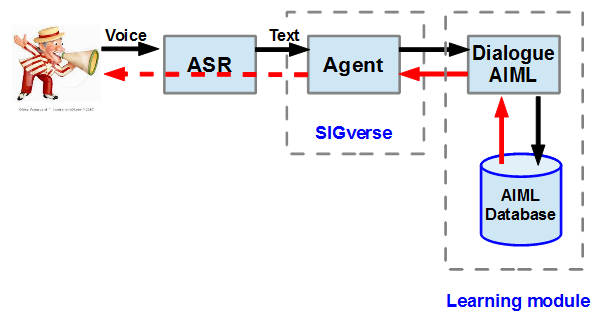
- Action Learning system based on AIML
- BVHファイルの読み込み(v120330, v1.4.8)?
- BVHファイルの読み込み(v2.0系)?
- Clean Up
- Collision detection by agents
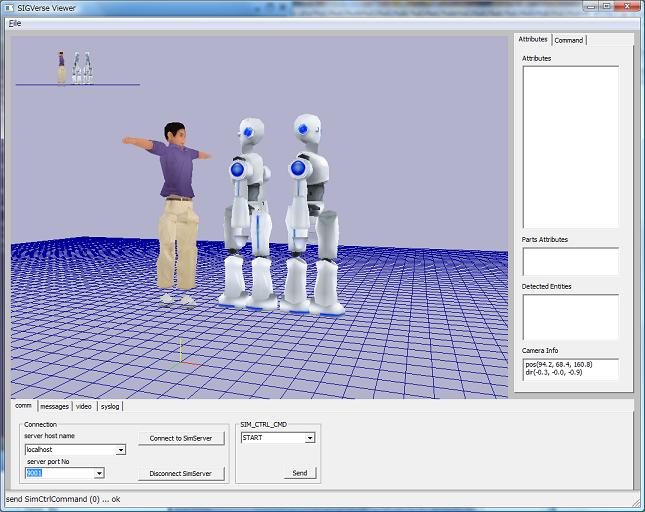
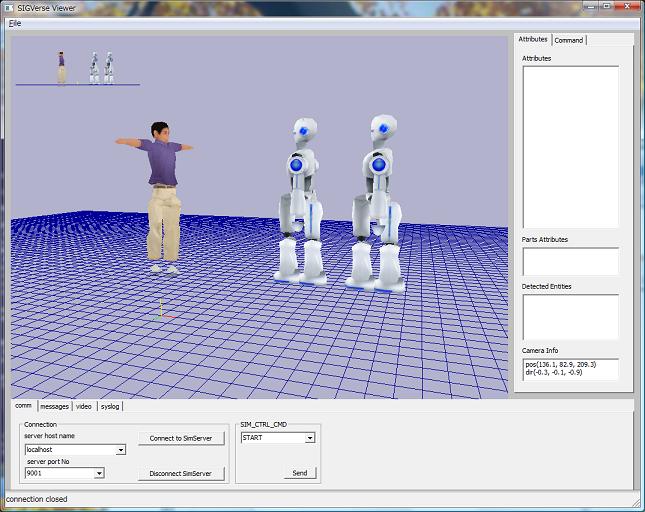
- Connect to SIGVerse server via socket using Winsock
- Control of a human avatar by keyboard
- Control of humanoid agent by BVH file
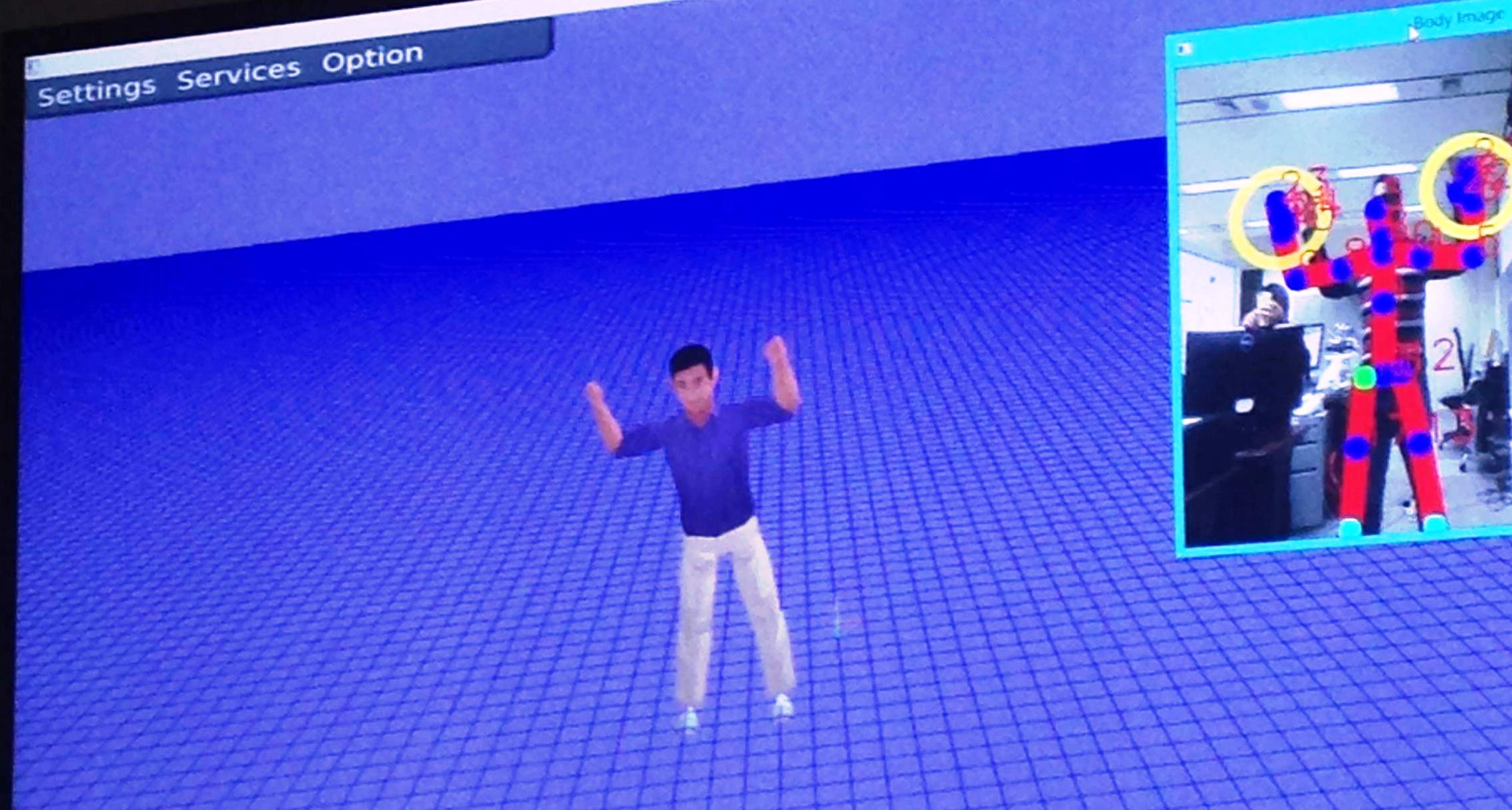
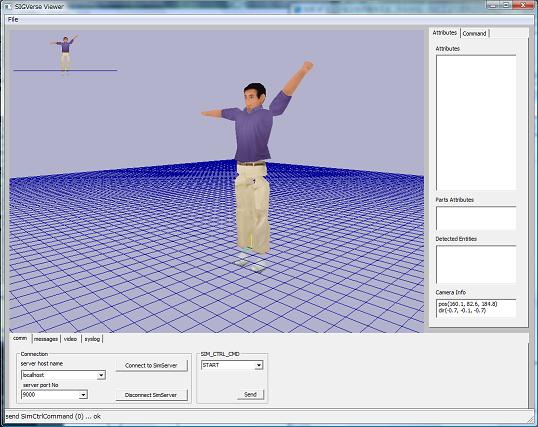
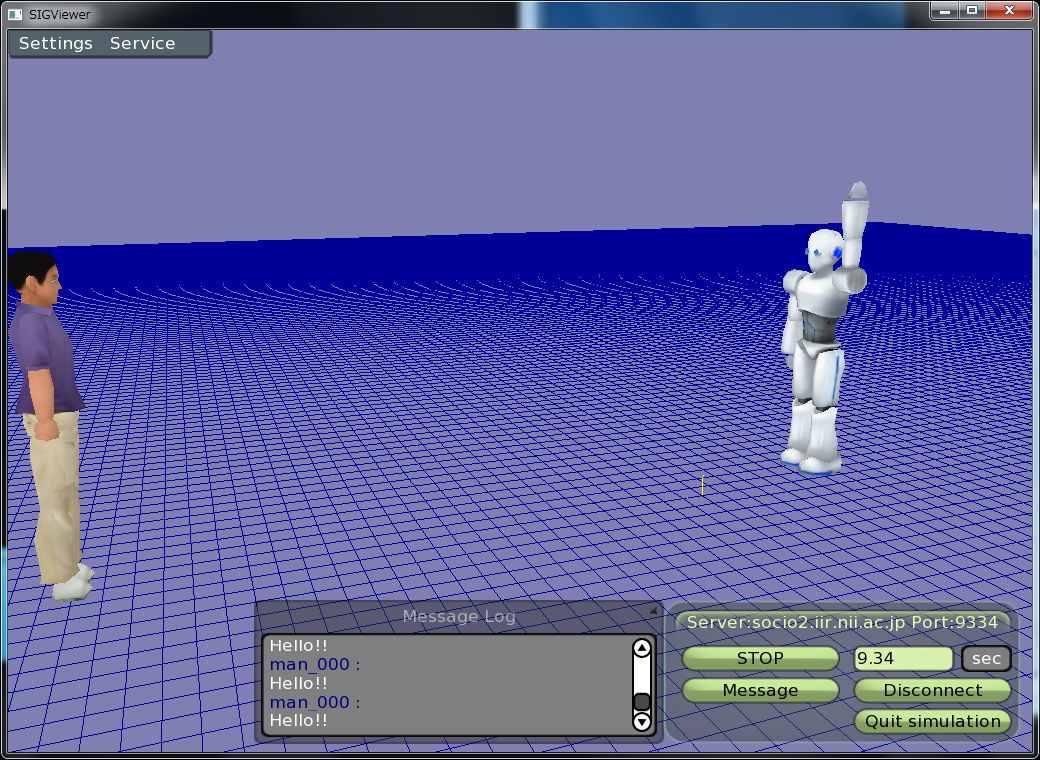
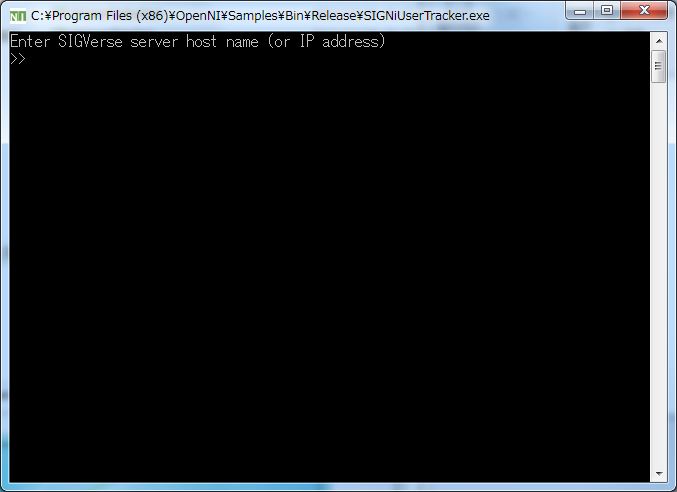
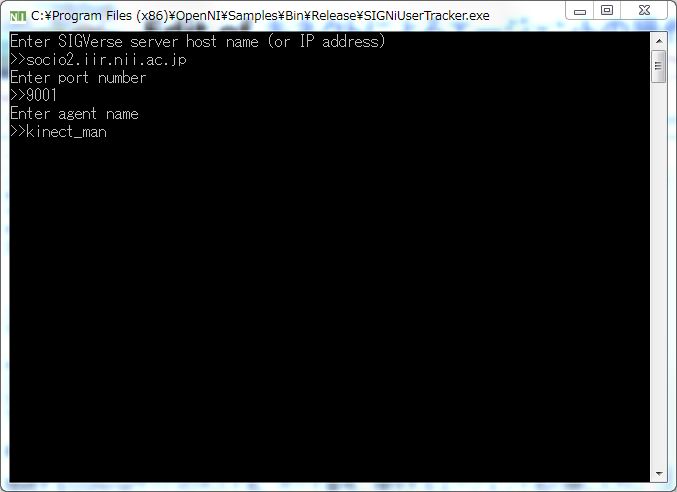
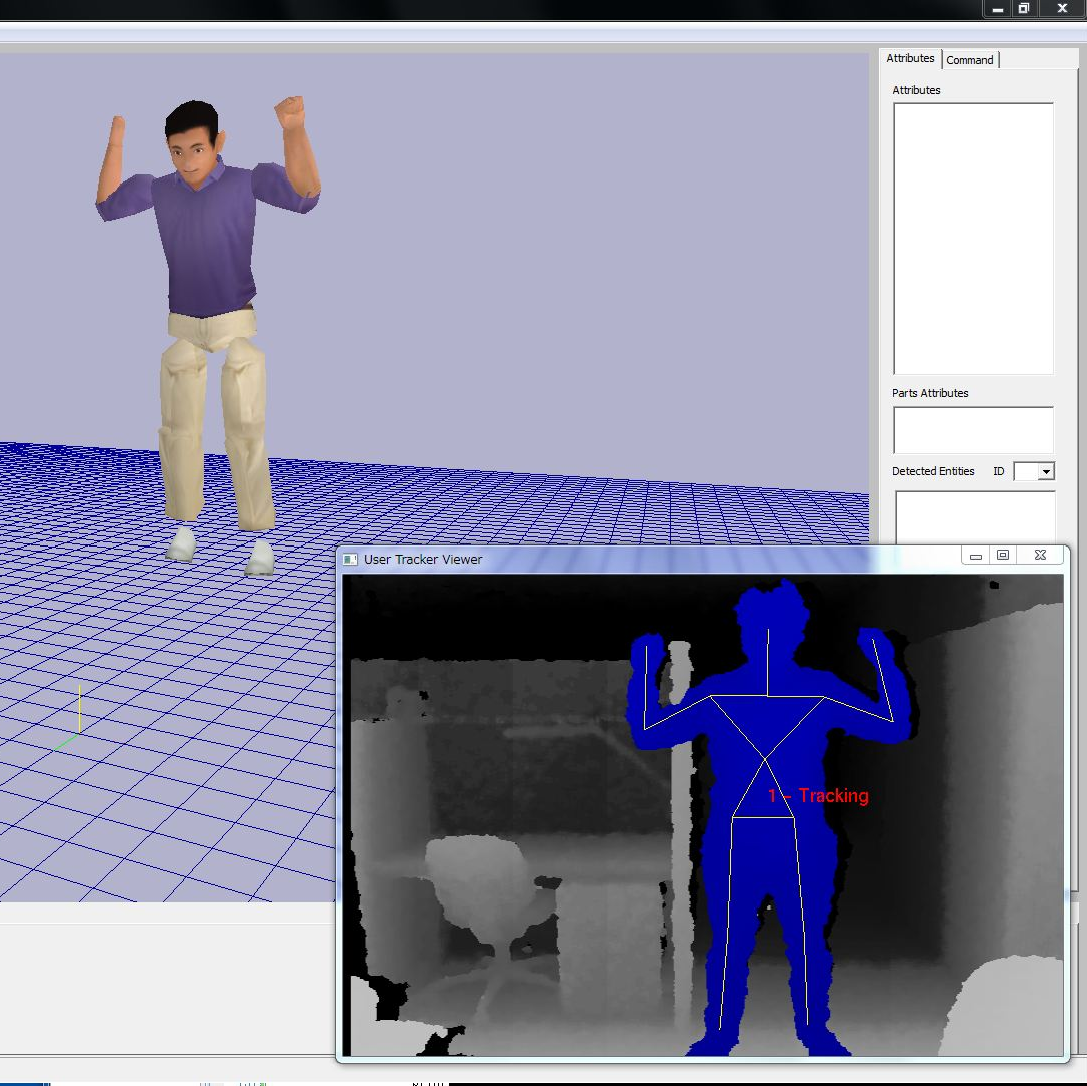
- Controlling Agent with KinectV2
- Controlling agent with Kinect
- Creating a service provider
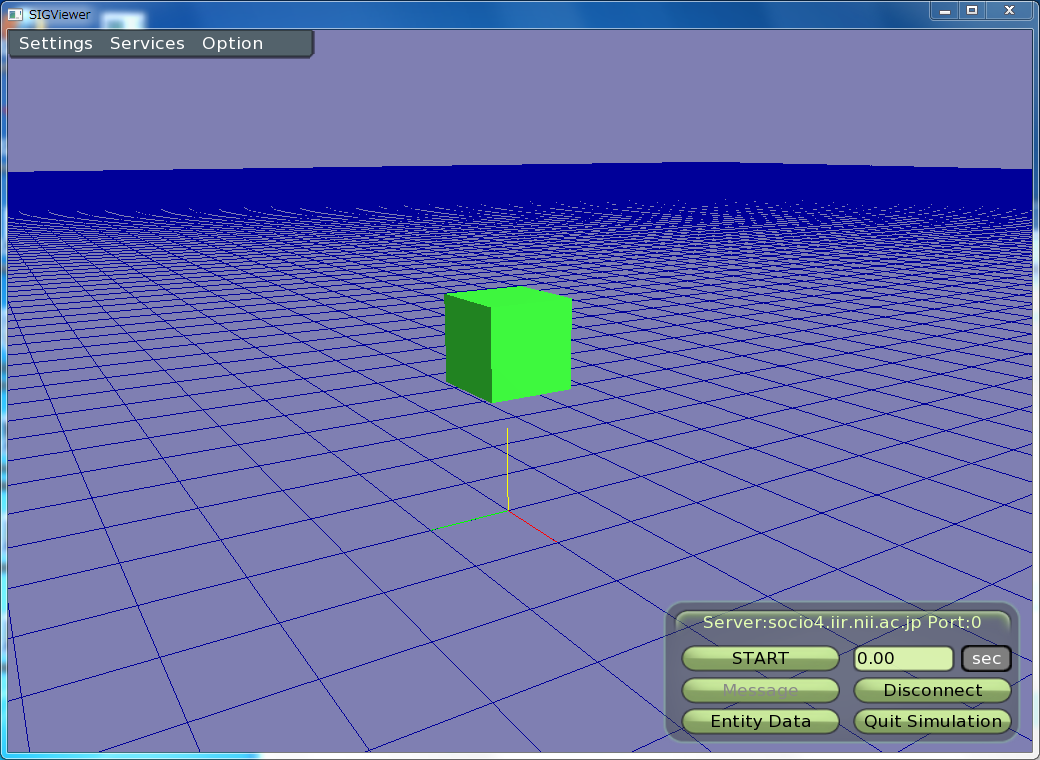
- Creating simple shapes with physics properties
- Distance sensor
- Document for ver.2
- Dynamics simulation
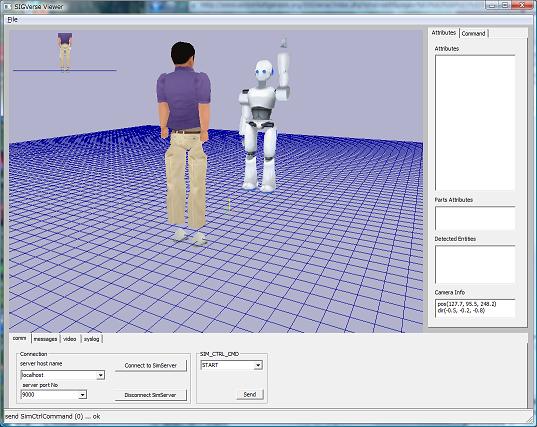
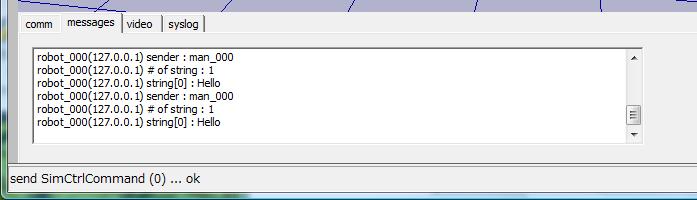
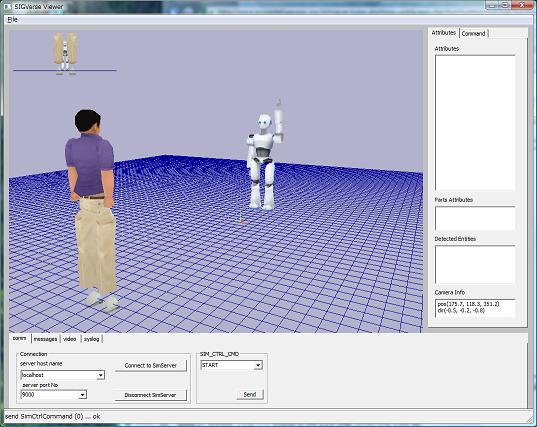
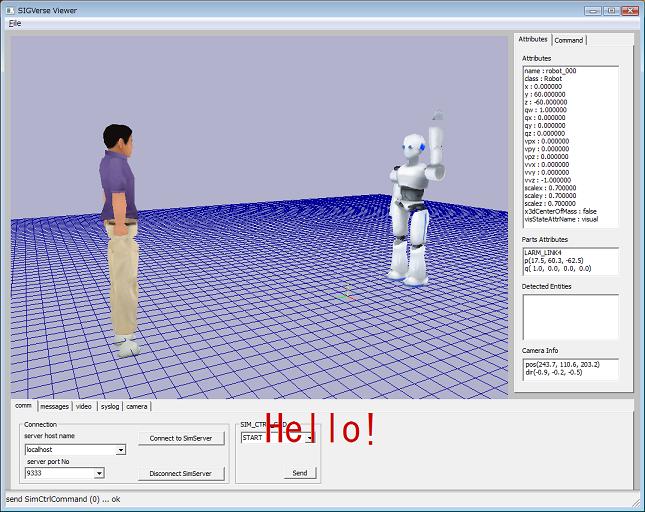
- Exchange of messages between agents
- Eye Movement (old v1.4.8)
- Eye movement
- Grasping Function
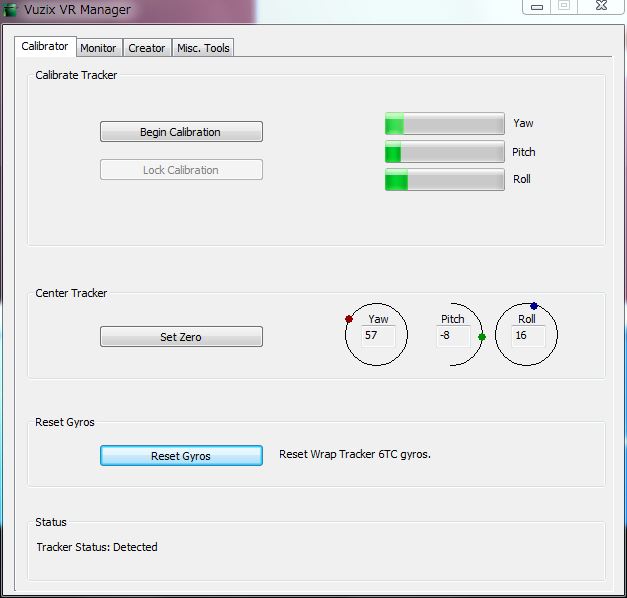
- HMD+KINECT
- HMD+KINECT(v2.0系)
- HMDサービス?
- How-to-add-a-new-parameter-inside-an-entity
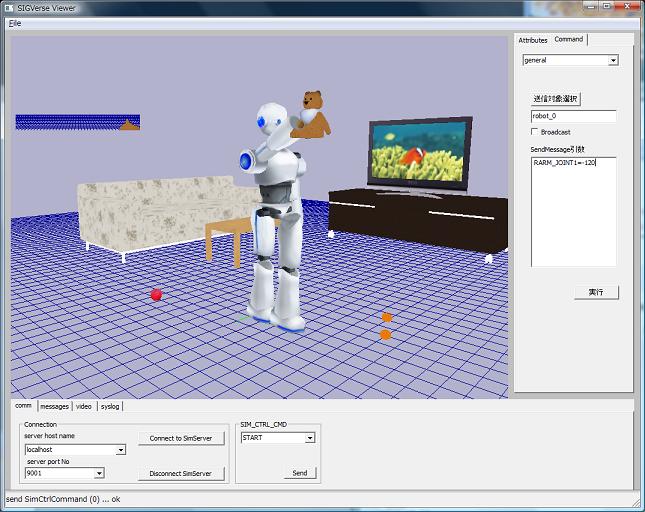
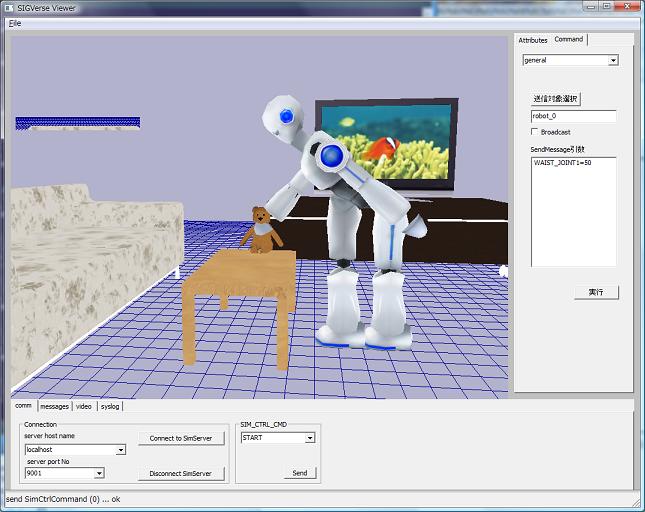
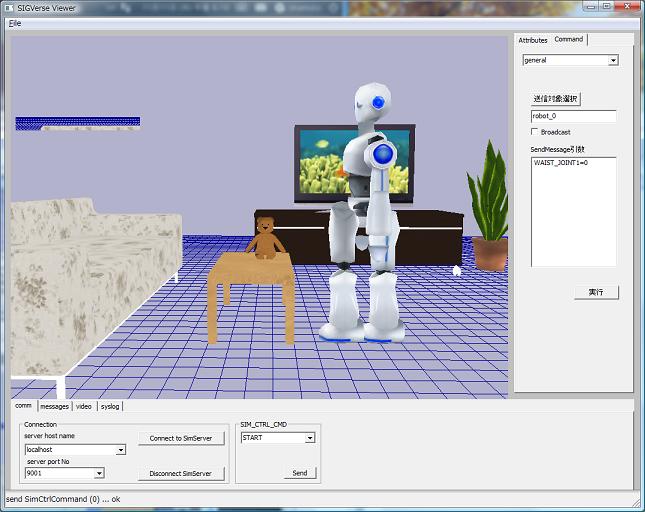
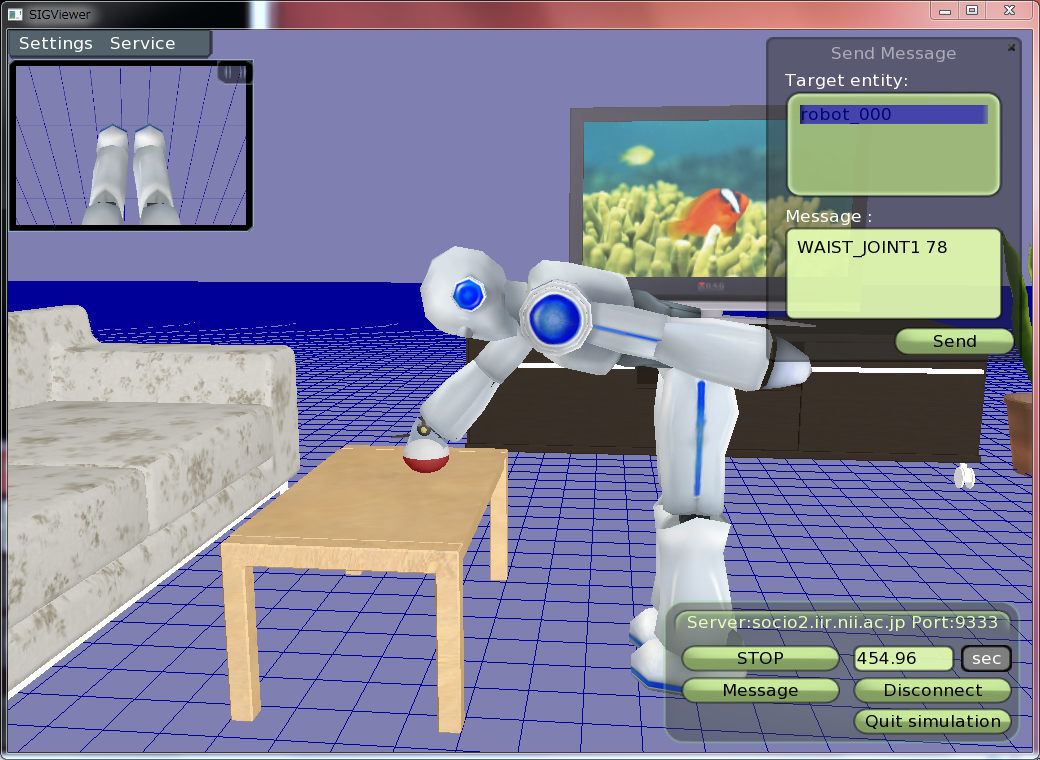
- Humanoid agent operations
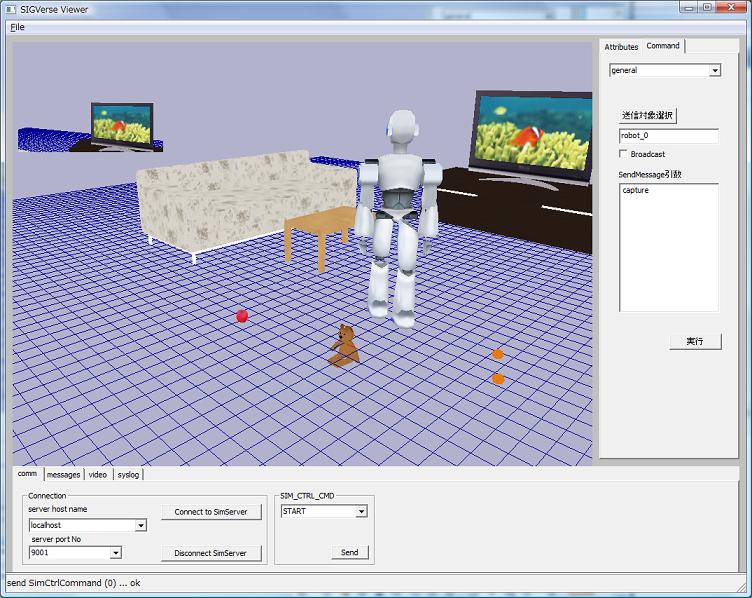
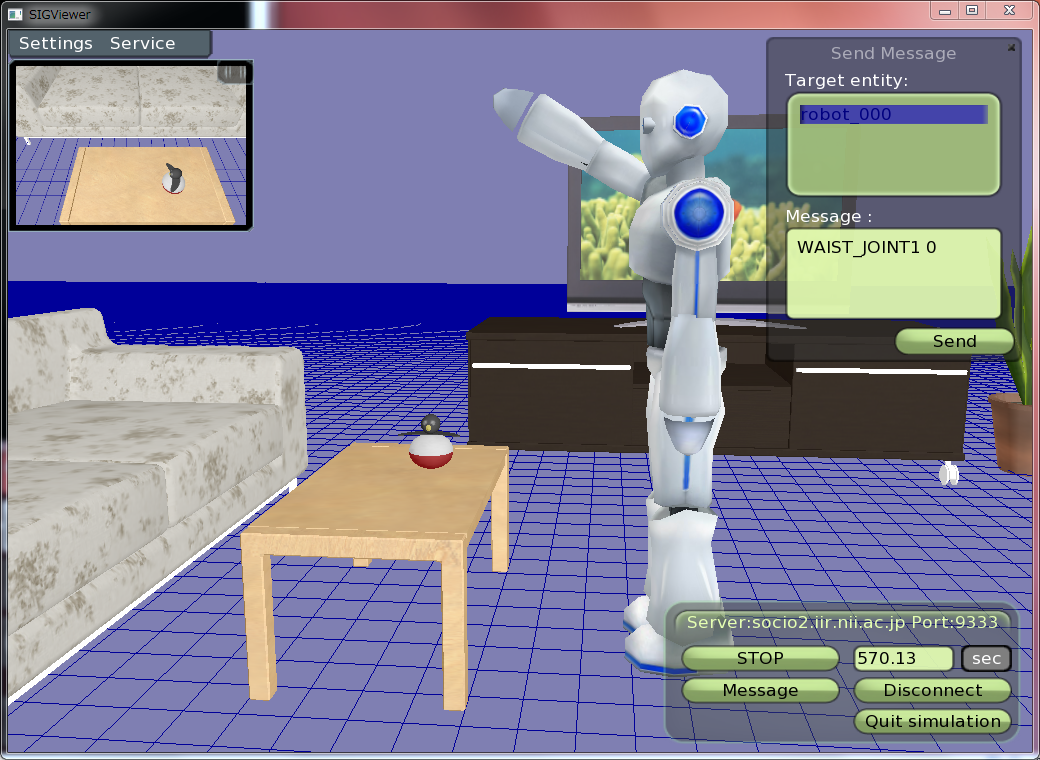
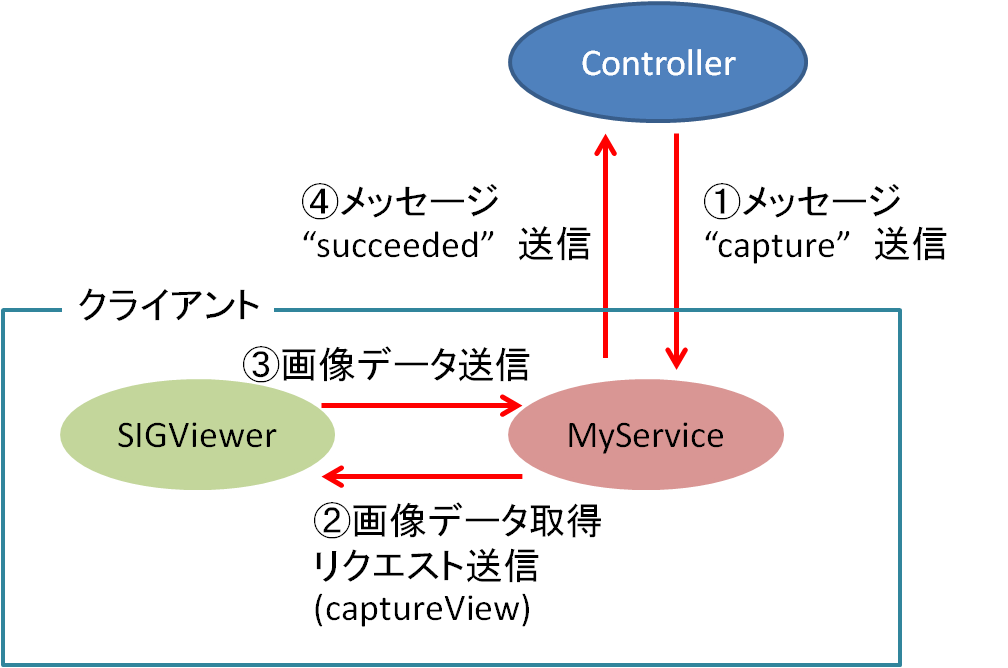
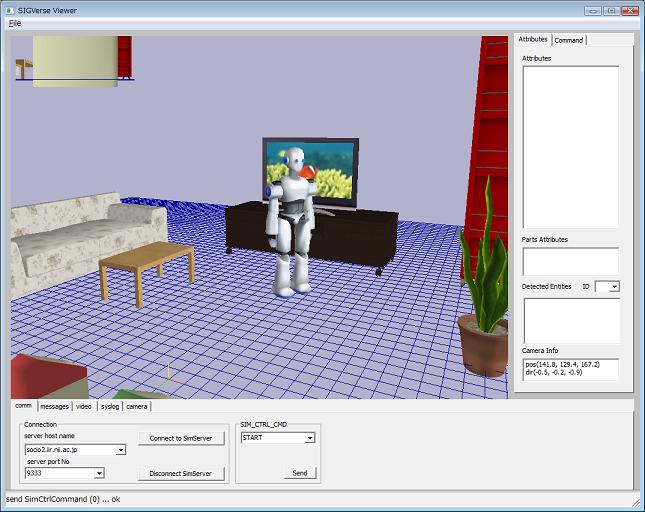
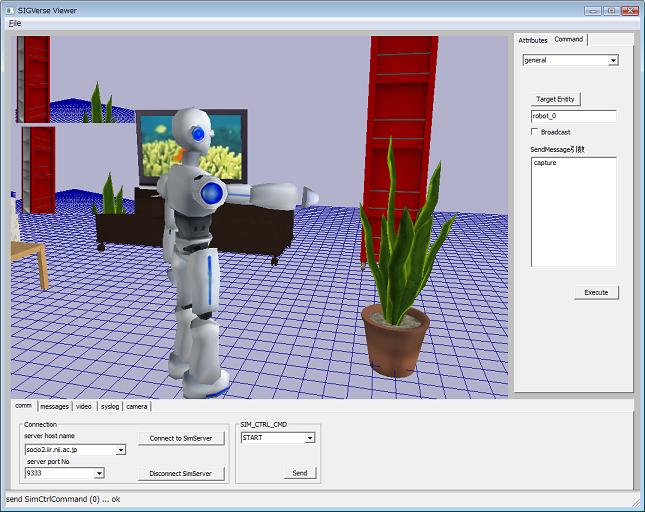
- Image capture from agent's perspective
- Introduction_old
- JSAIConf2009?
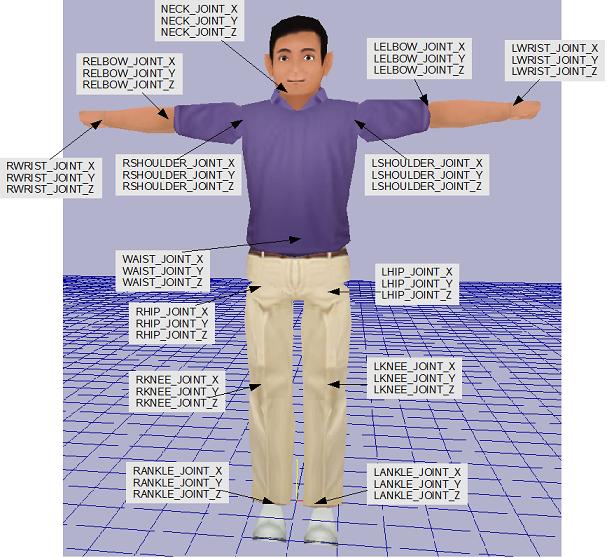
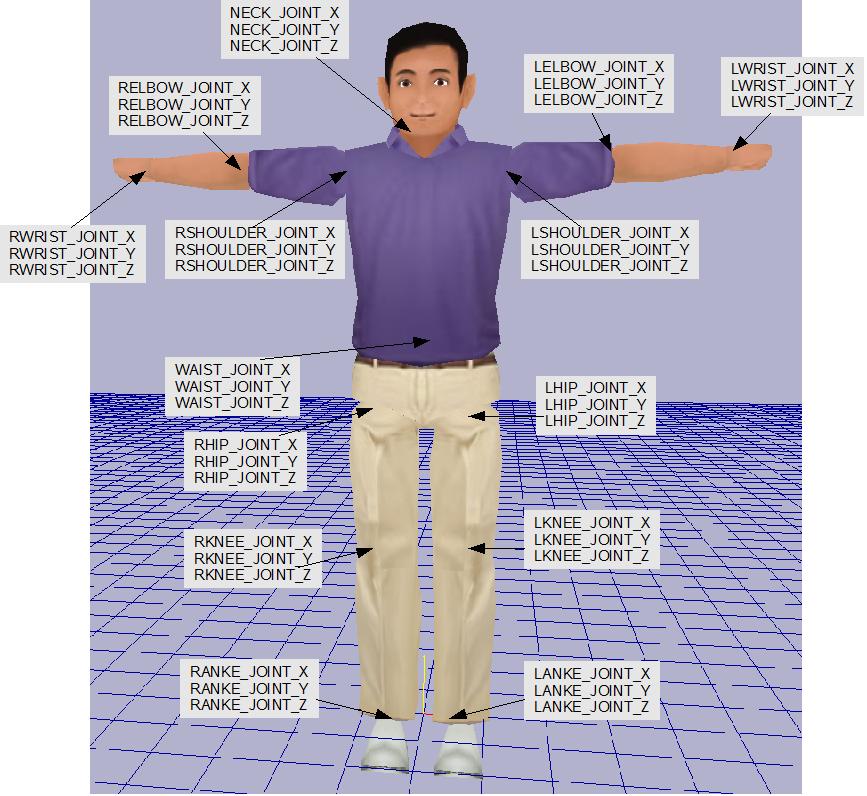
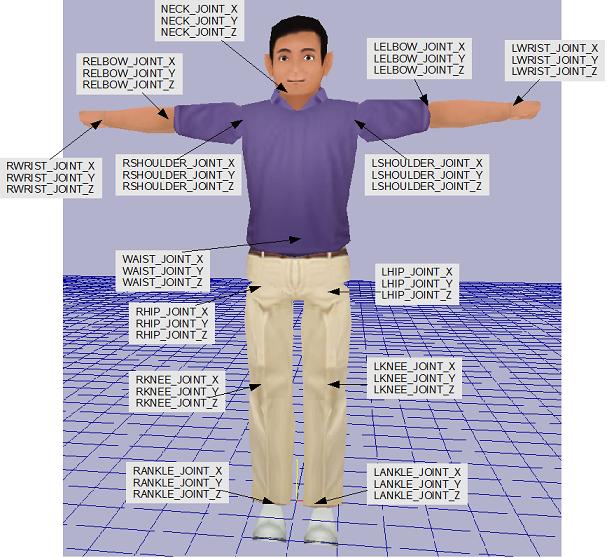
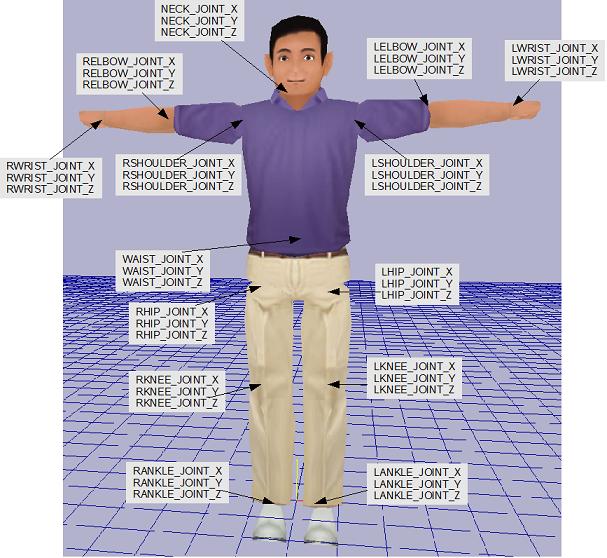
- JointDefinition
- Joystick service
- KINECT Service
- NII Open House
- Okonomiyaki Collaborative Cooking Agent
- Paper Lists
- PressRelease
- Publication for ver.2
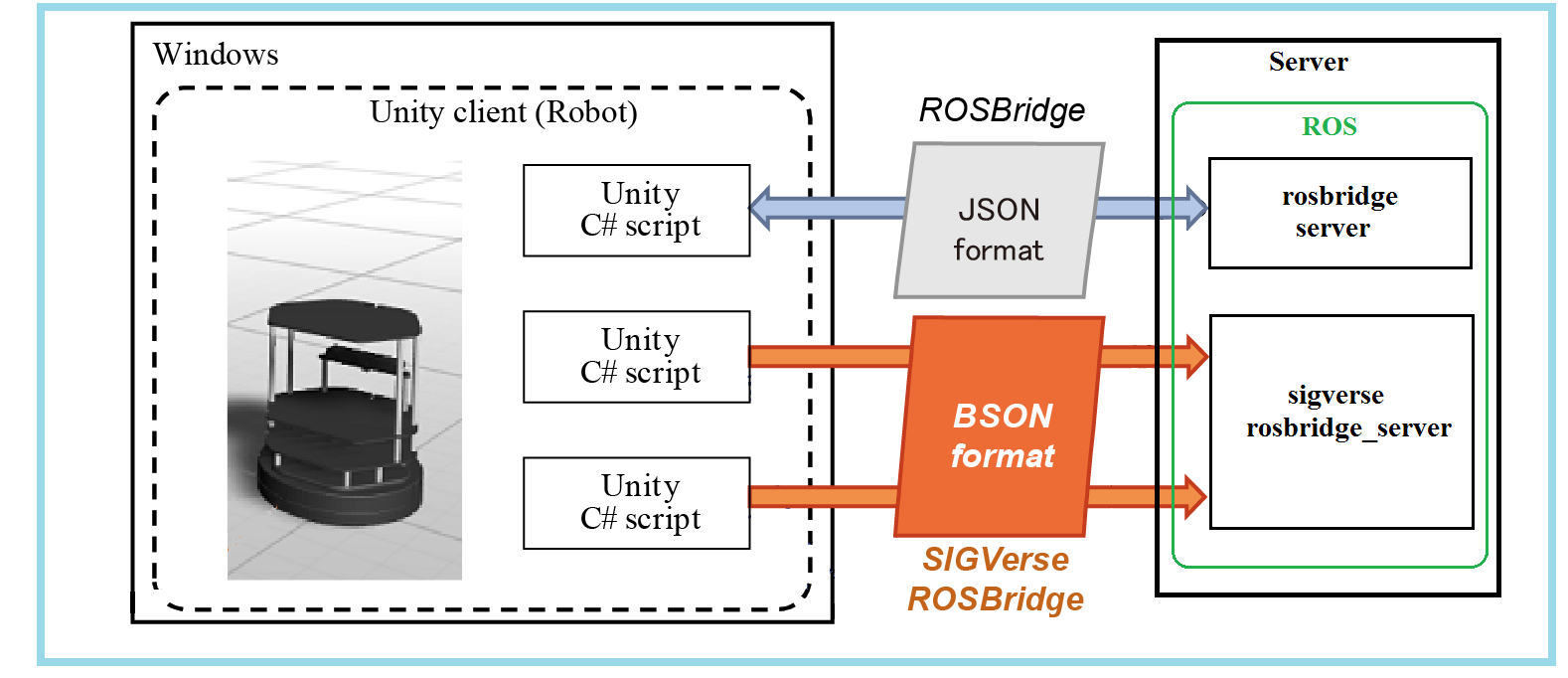
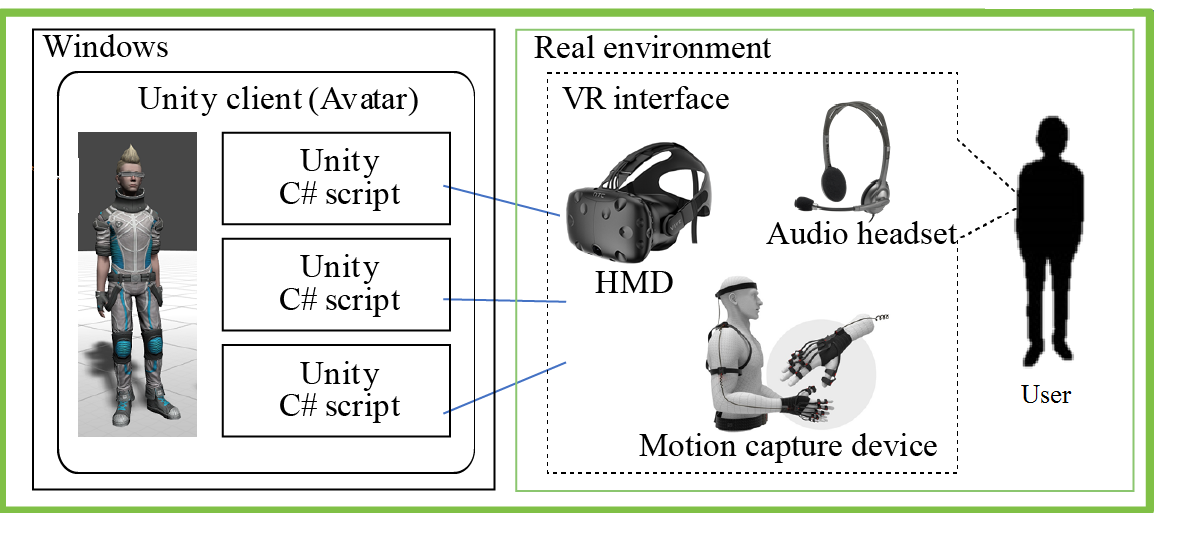
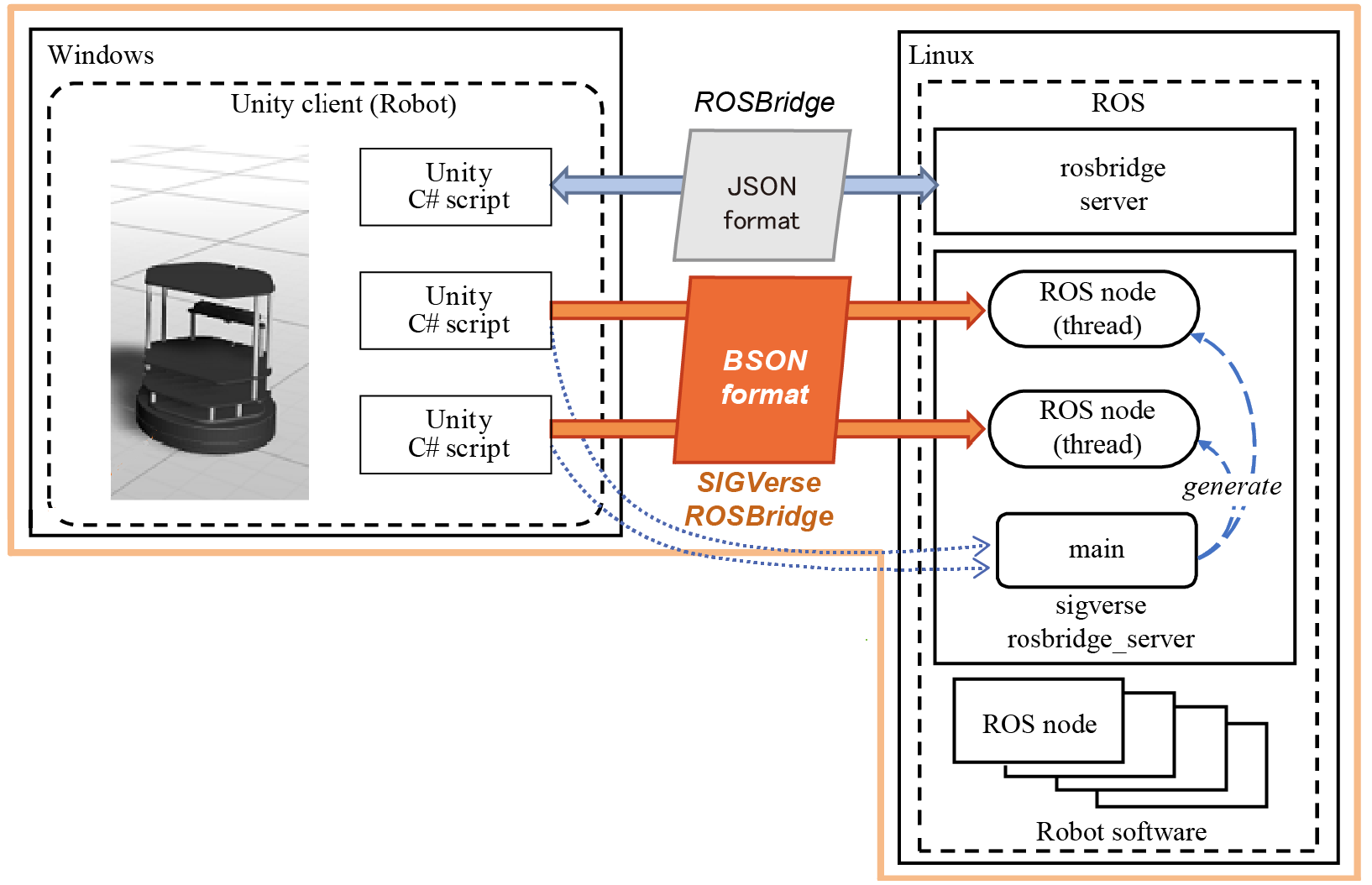
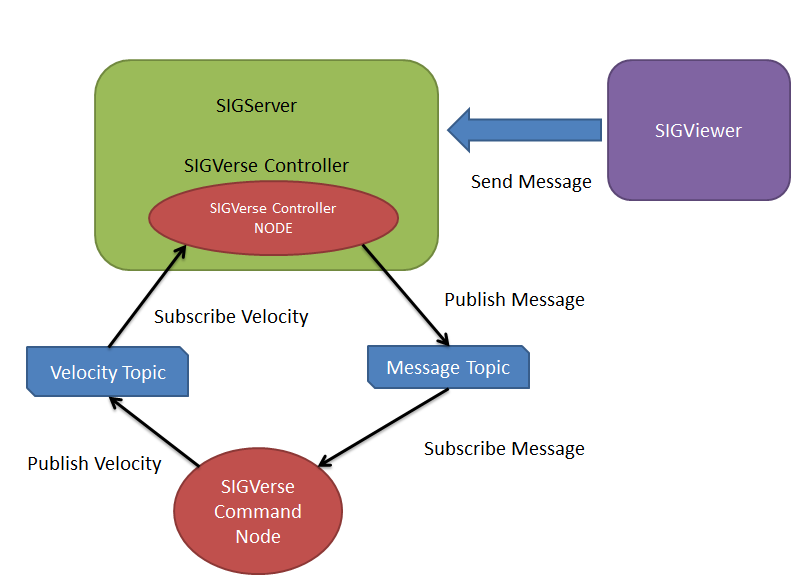
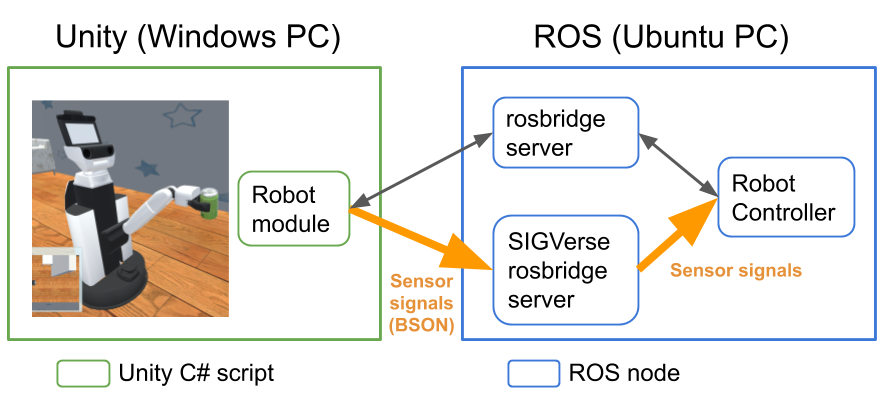
- ROS integration
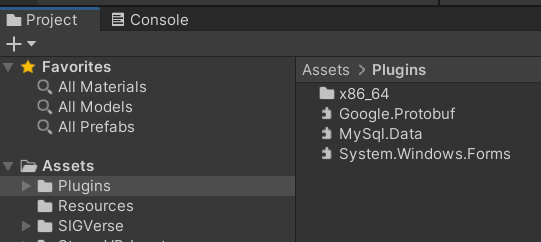
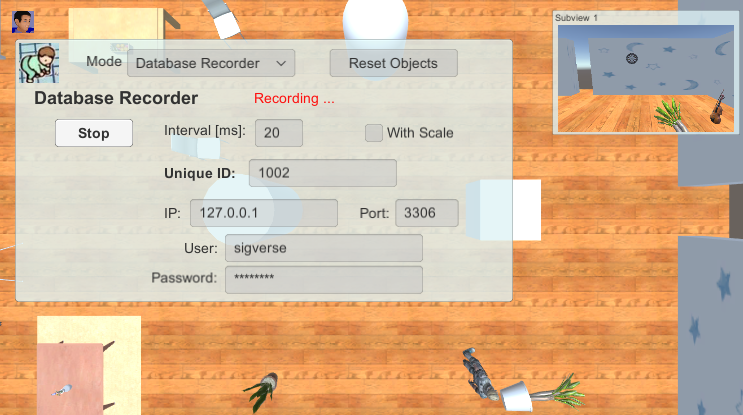
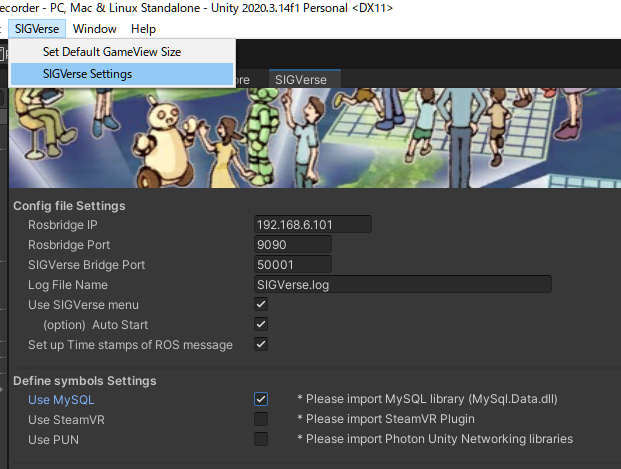
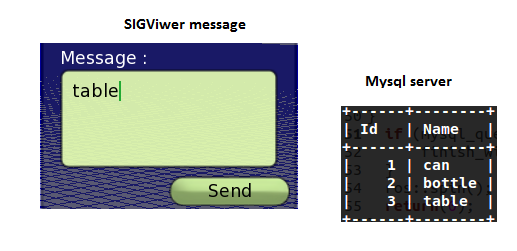
- Record and Play Character Movement (Save to MySQL)
- Record and Play Character Movement (Save to Text file)
- Robomec2009?
- Run Test Sample?
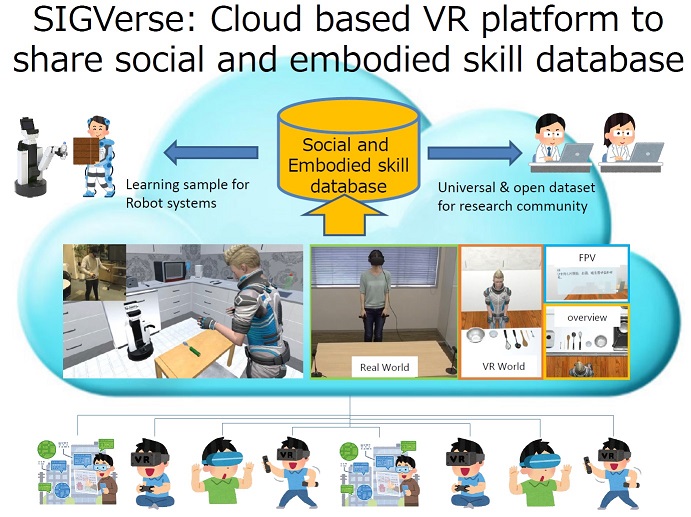
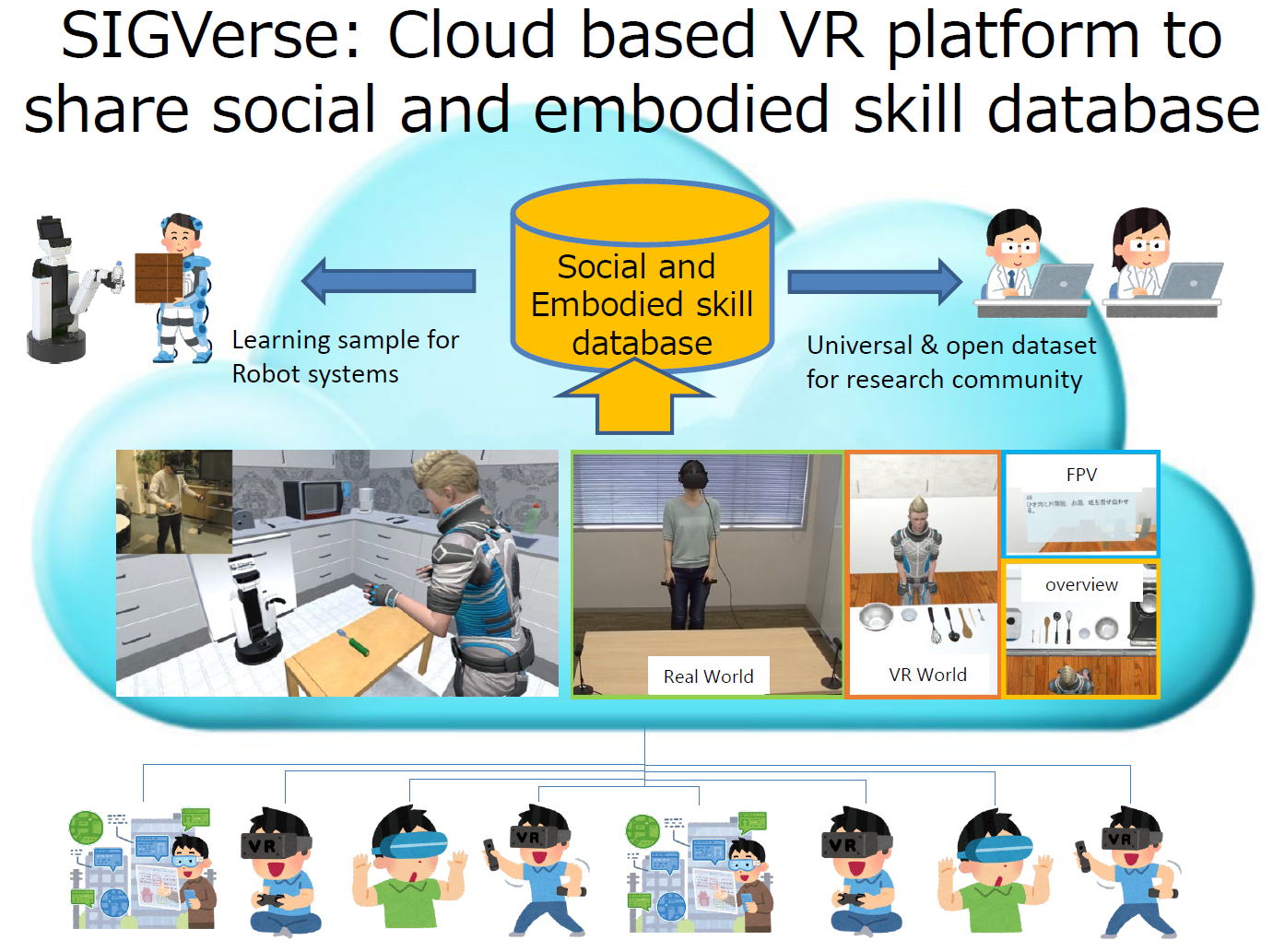
- SIGVerse
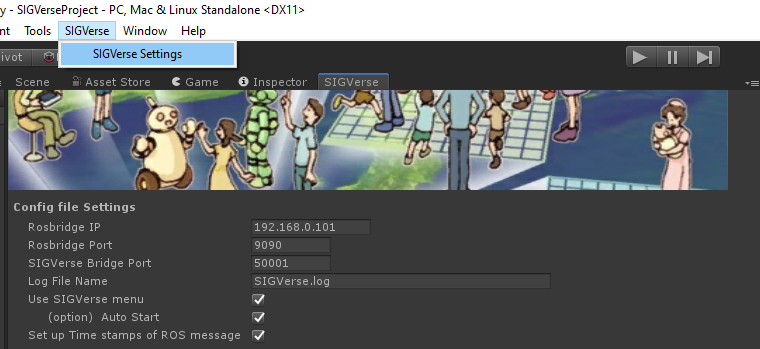
- SIGVerse ROS Integration
- SIGVerse Web
- SIGVerse Web (創発システムシンポジウム専用情報)?
- SIGVerse(English)?
- SIGVerseのインストール
- SIGVerseのインストール(NIIサーバ)_2.0.3?
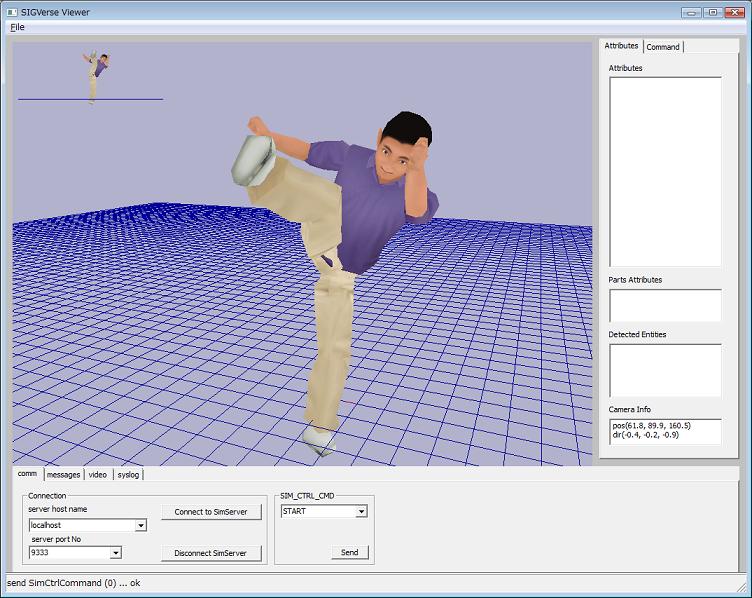
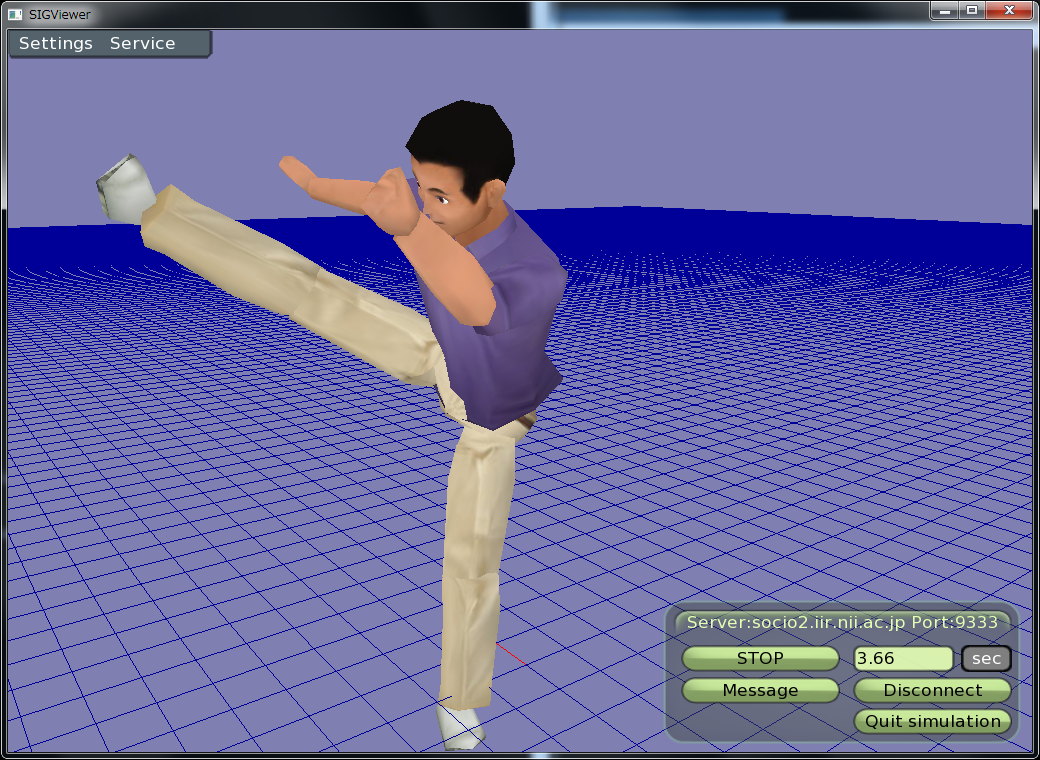
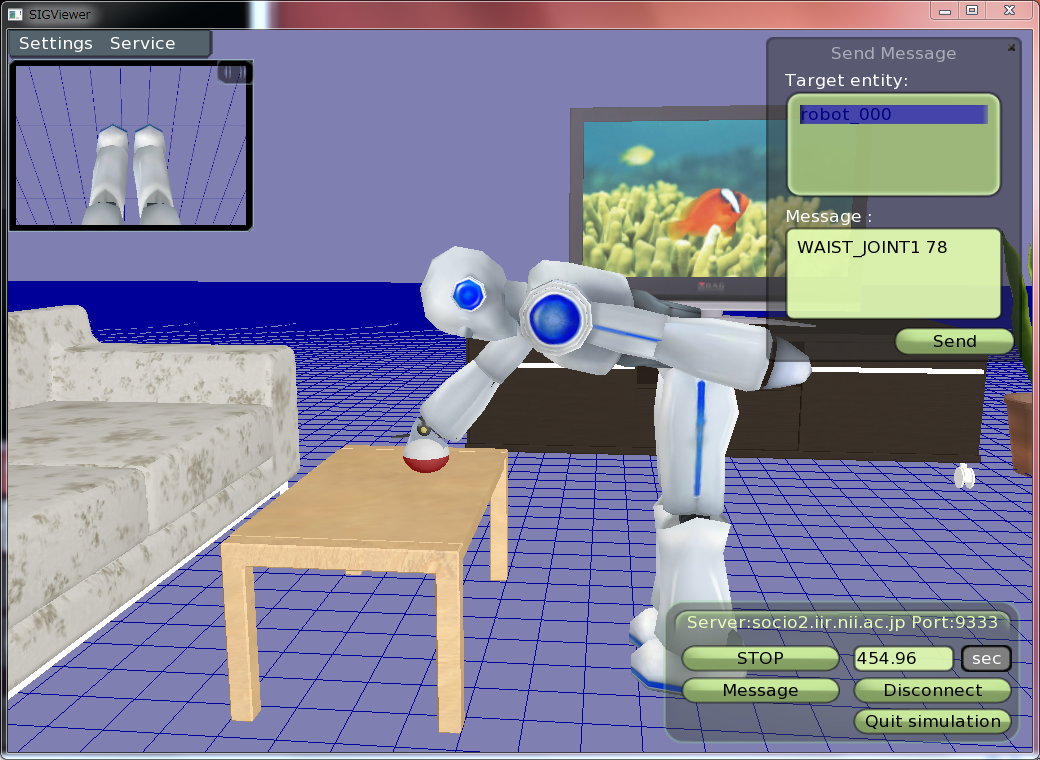
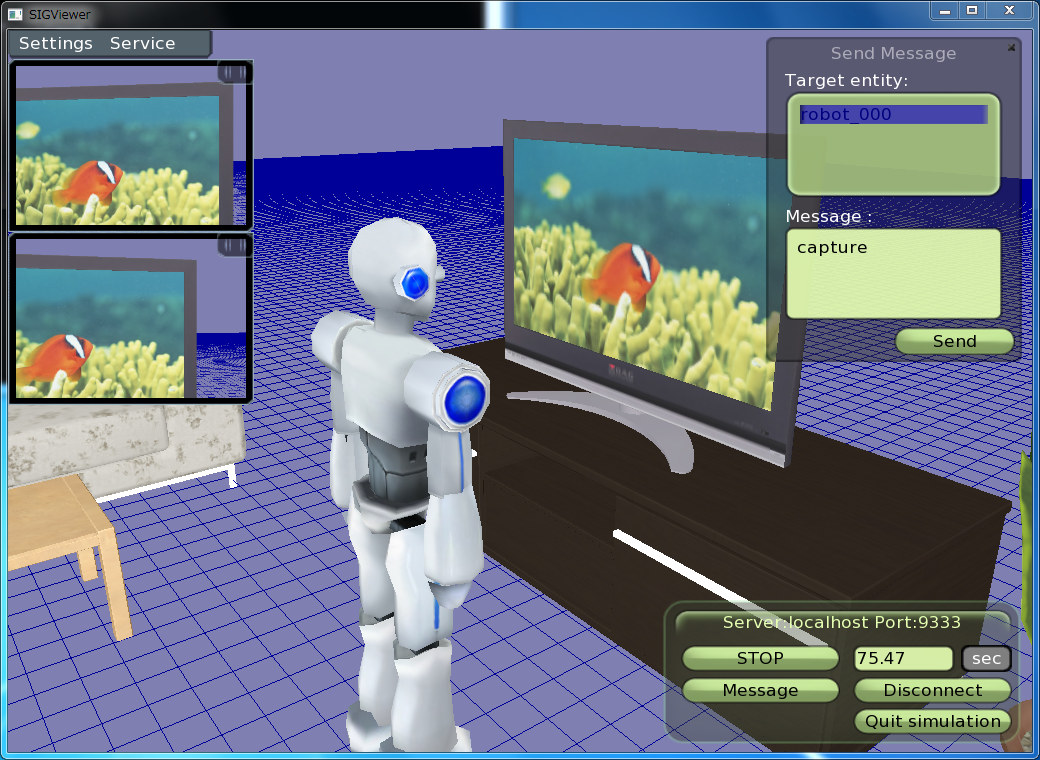
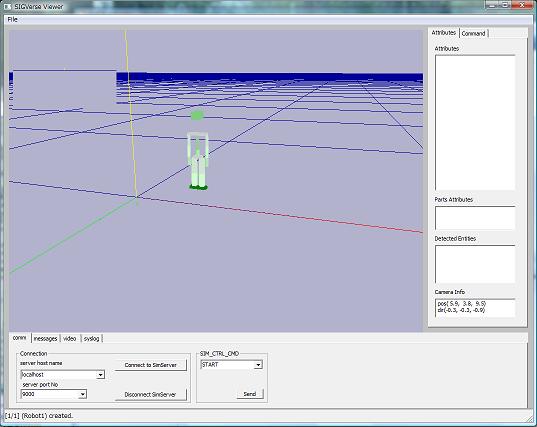
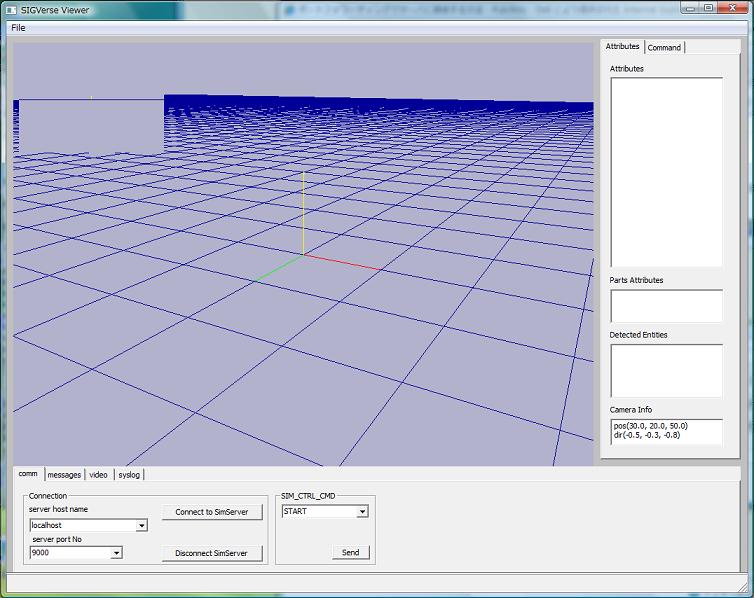
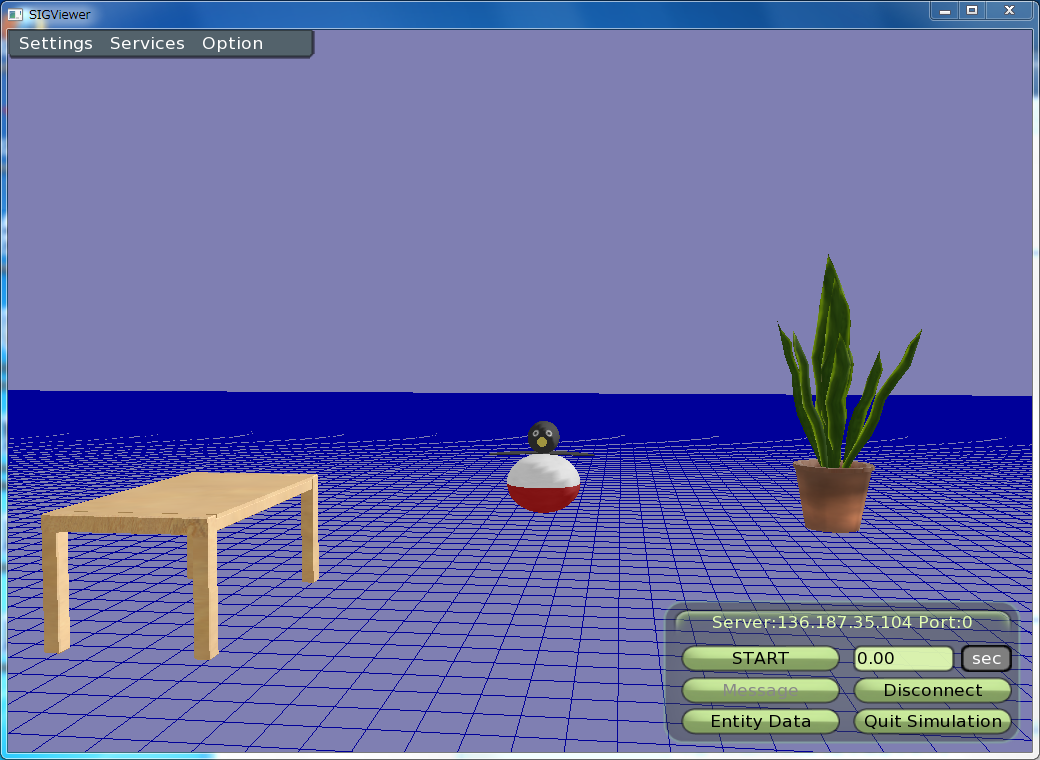
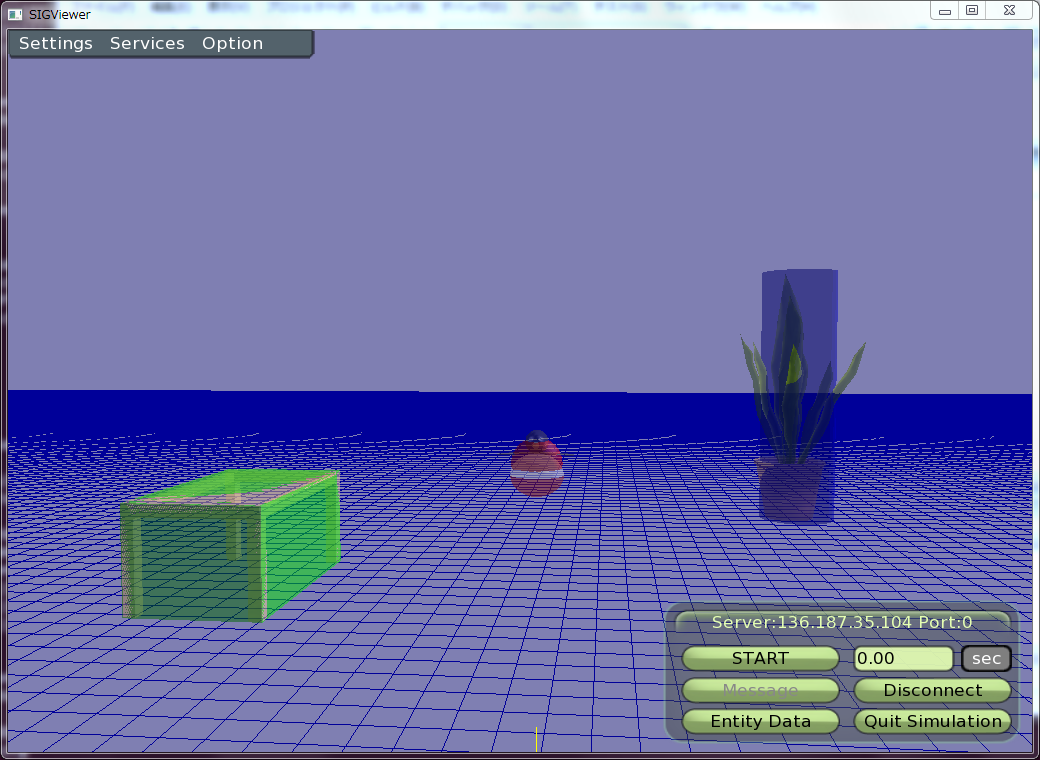
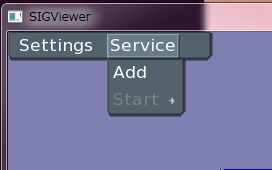
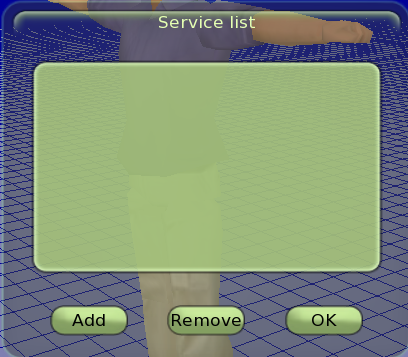
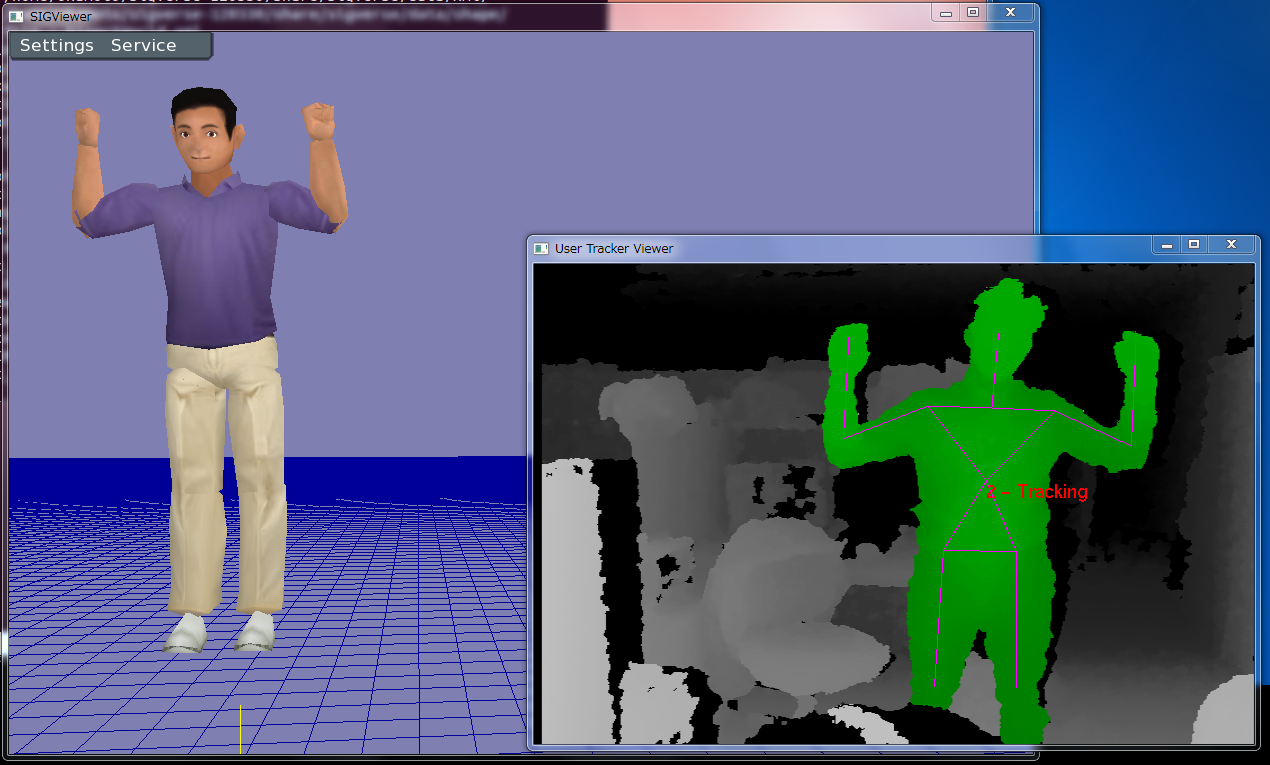
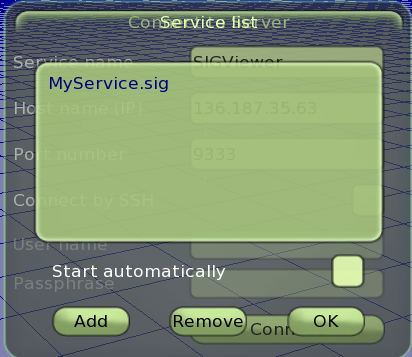
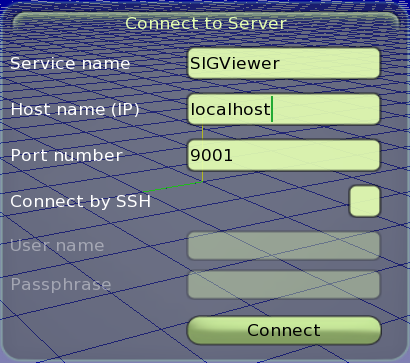
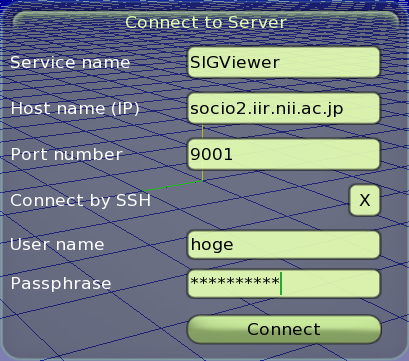
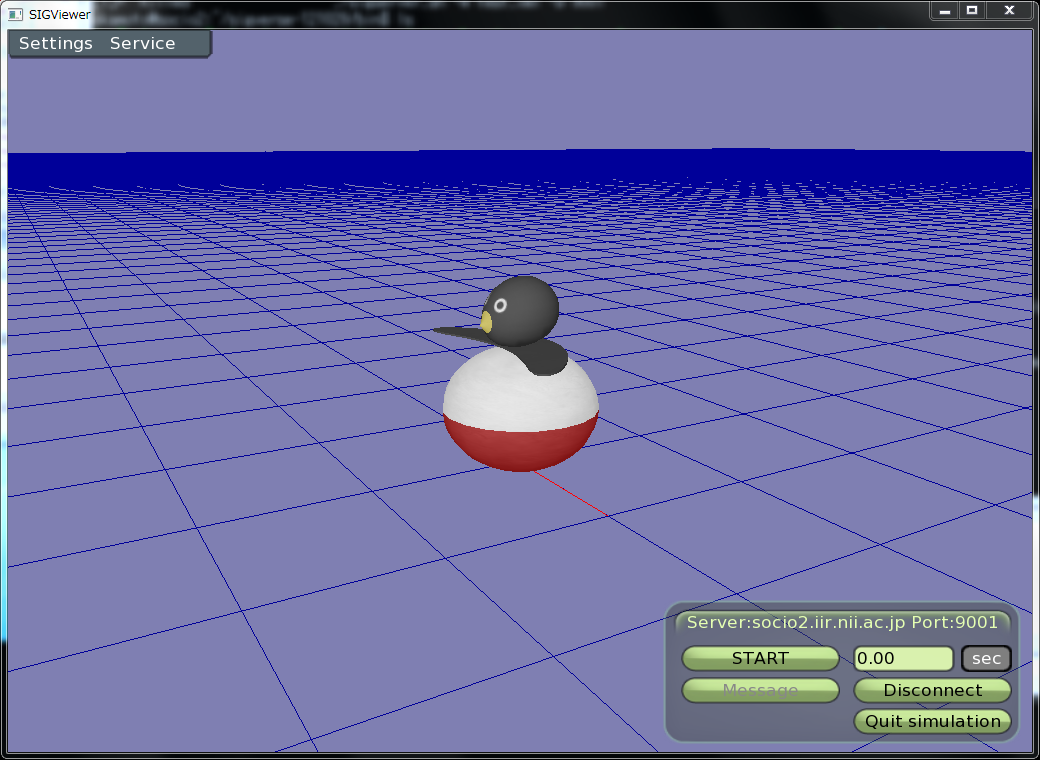
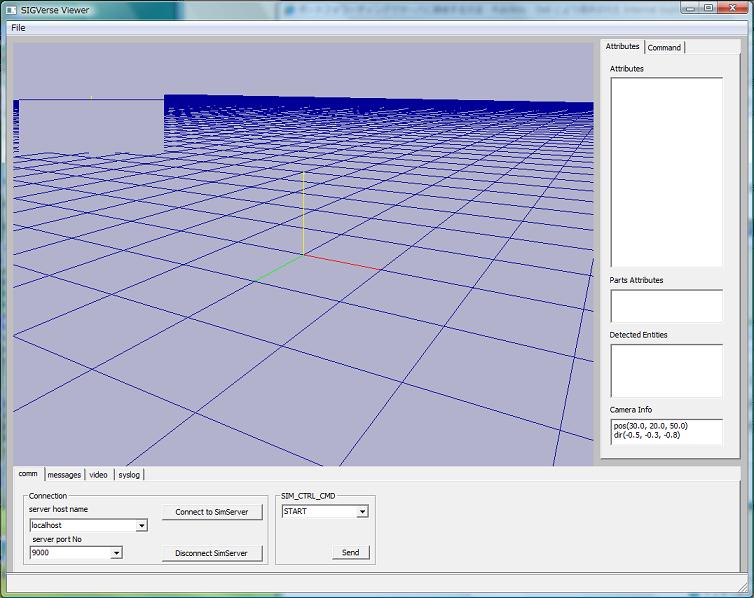
- SIGViewer
- SSH接続(v120330, v1.4.8)
- Samples of the dynamics simulations
- Samples/Communication between agents?
- Samples/Control of humanoid agent?
- Speech Recognition?
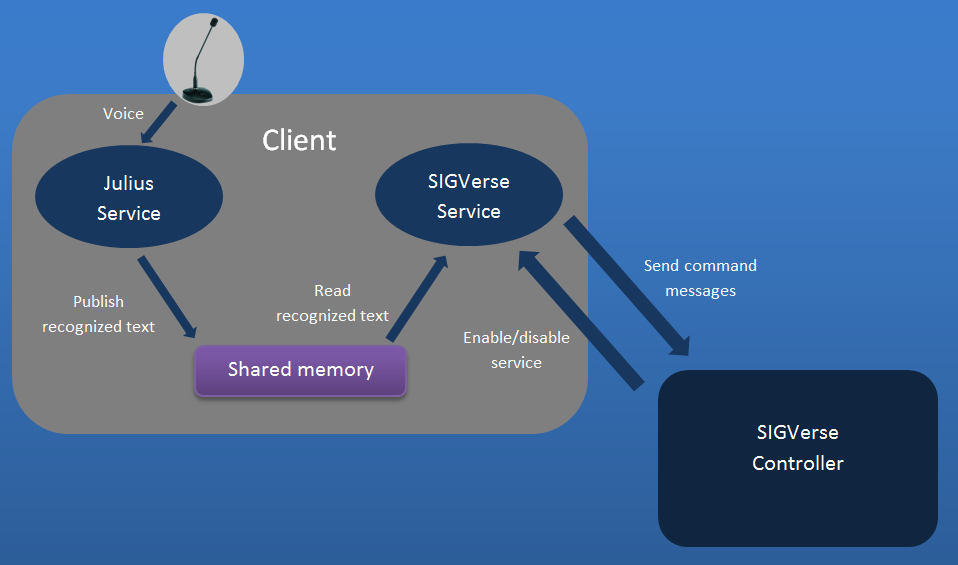
- Speech recognition using Julius
- Speech_Recognition_using_Microsoft_SAPI
- System
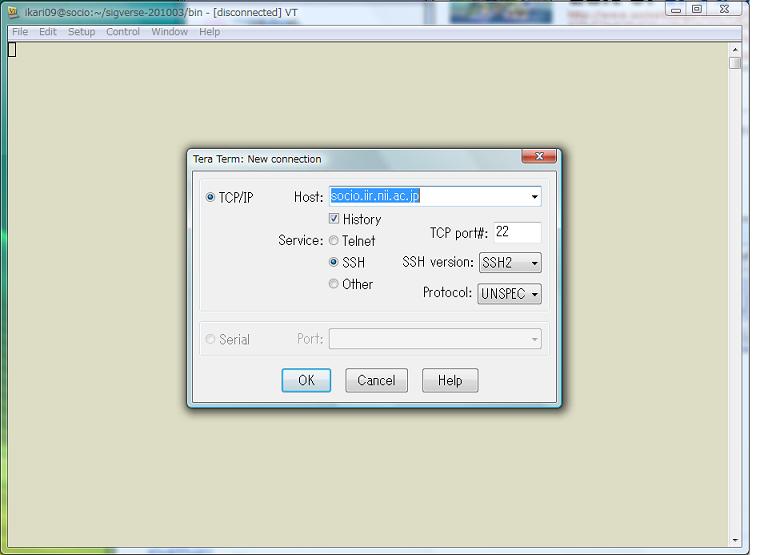
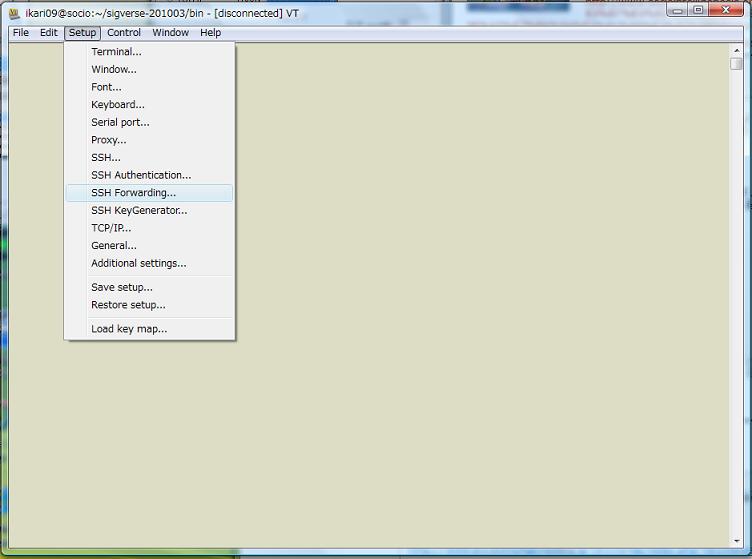
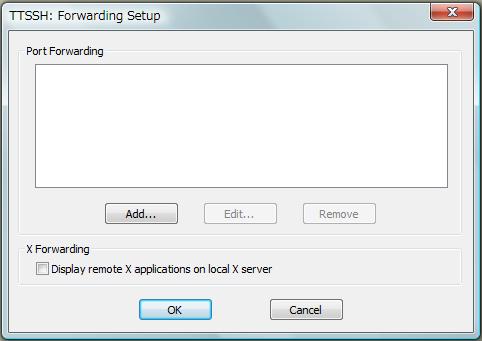
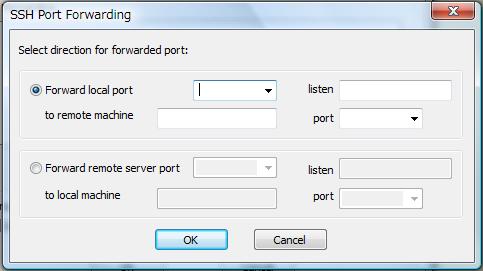
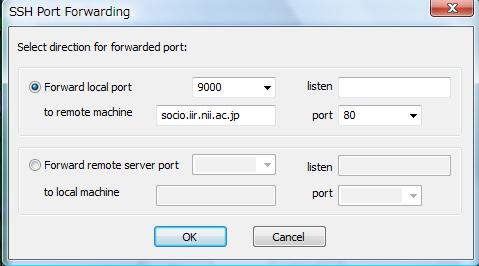
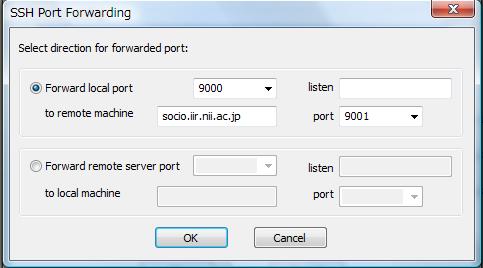
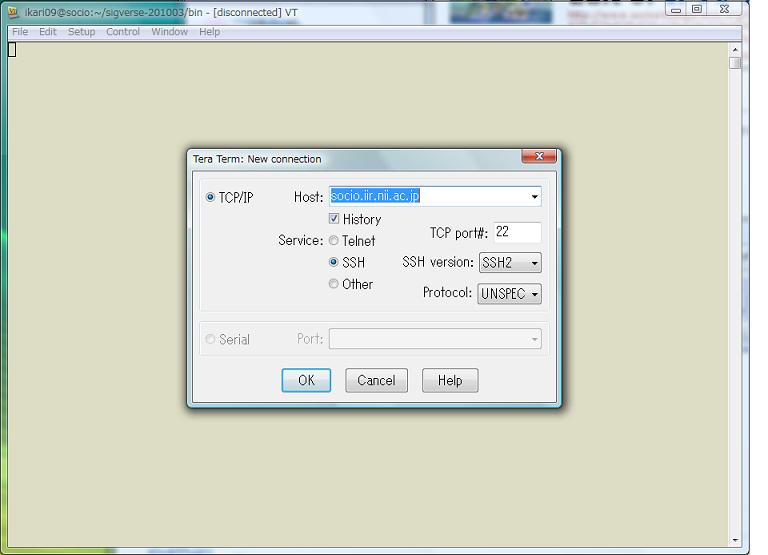
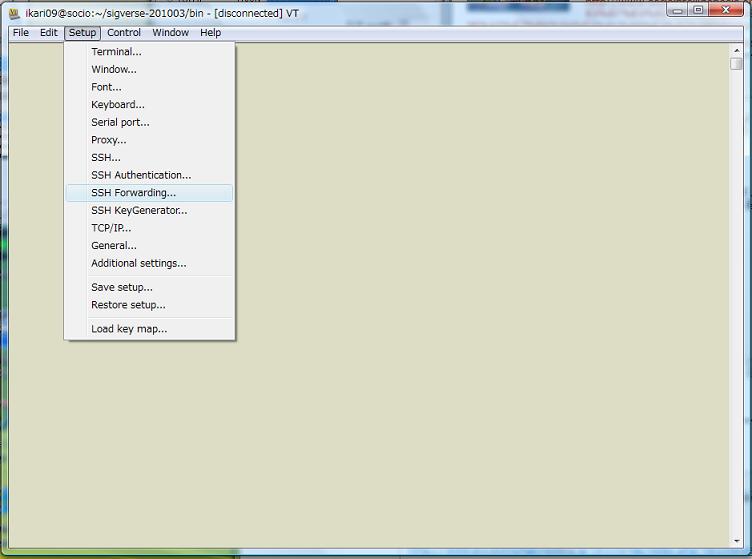
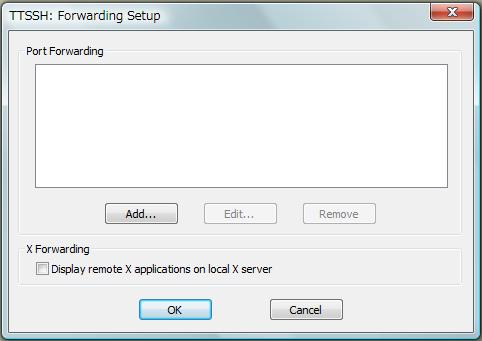
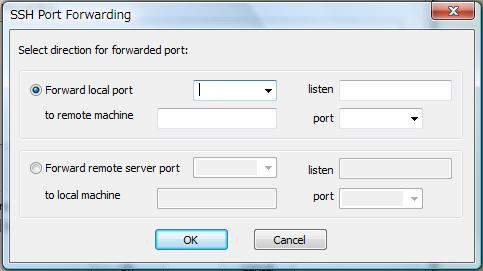
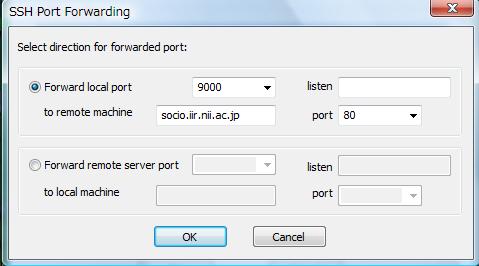
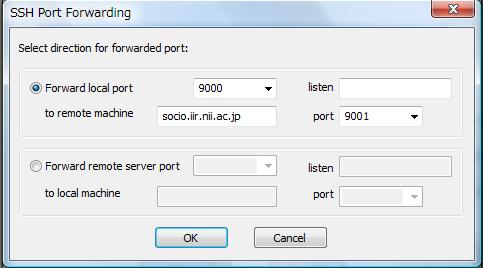
- TeraTermによるポートフォワーディングの設定
- Tutorial at IROS2019
- Tutorial for ver.2
- Tutorial for ver.2/Configuration
- Tutorial for ver.2/Execution of test
- Tutorial for ver.2/Installation of SIGVerse server
- Tutorial for ver.3
- Tutorial using ROS for ver.3
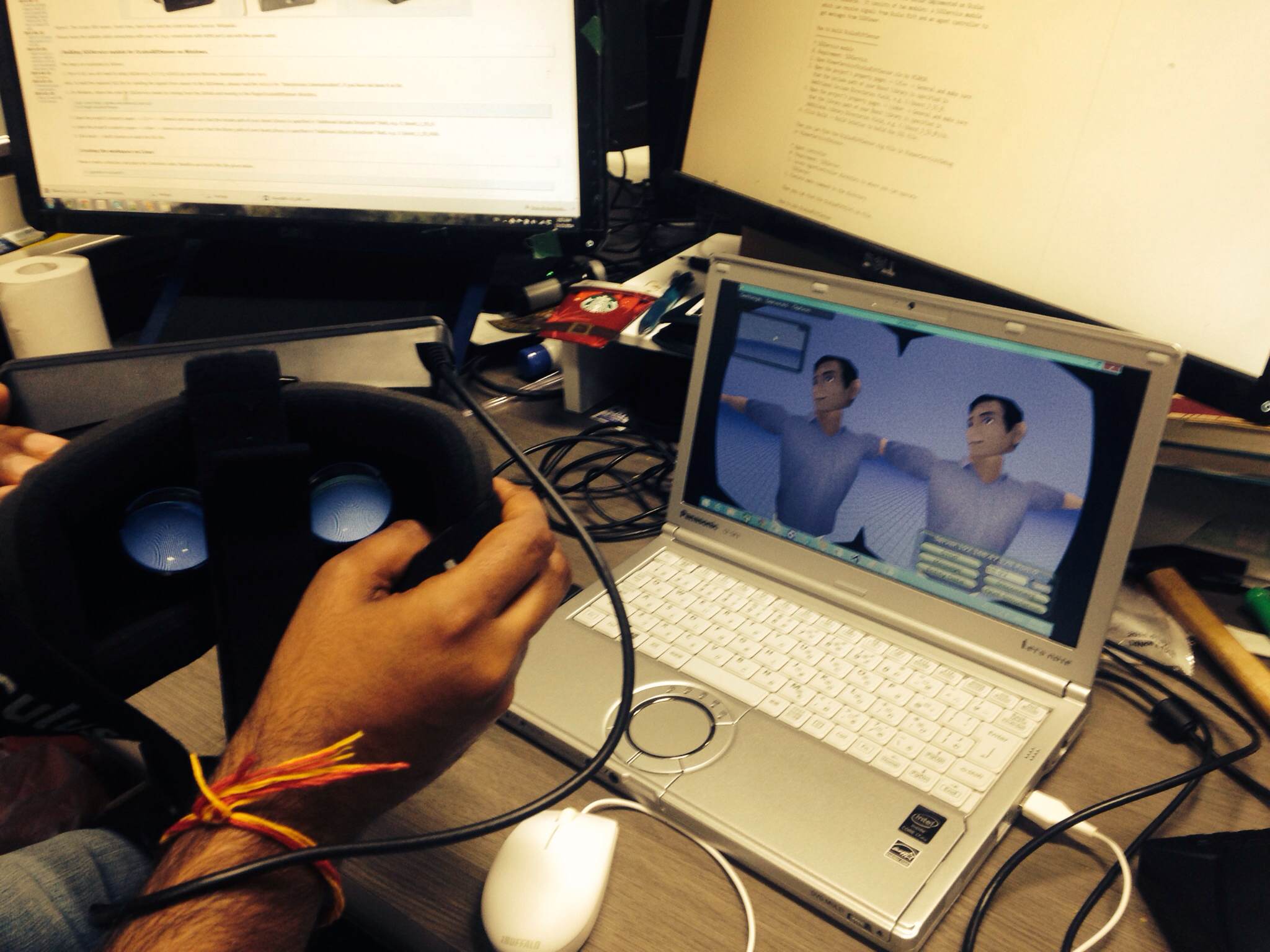
- Using Oculus Rift
- Using PS Move Controller Device
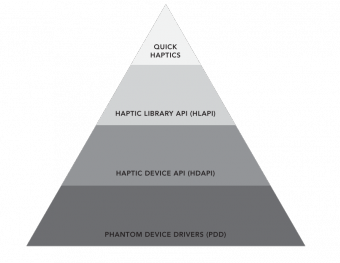
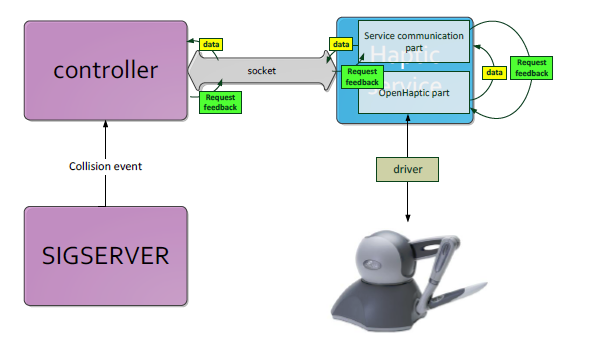
- Using Phantom Omni Haptik Device
- Vision sensor
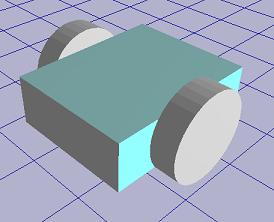
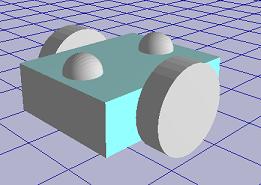
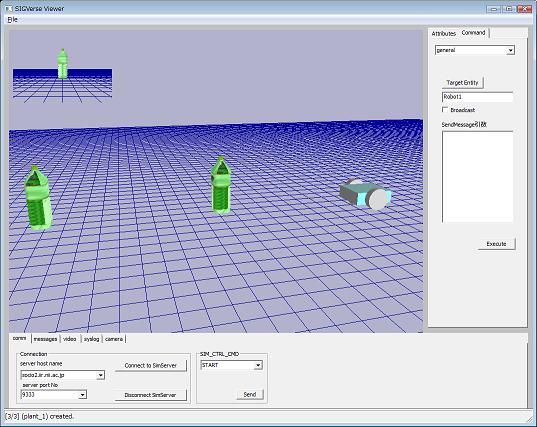
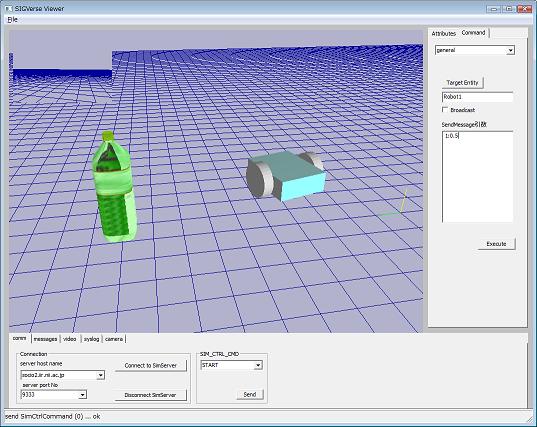
- Wheeled mobile robot
- joystick control using ROS
- mysql connection using ROS
- old/How to connect to server via port forwarding
- old/Speech recognition
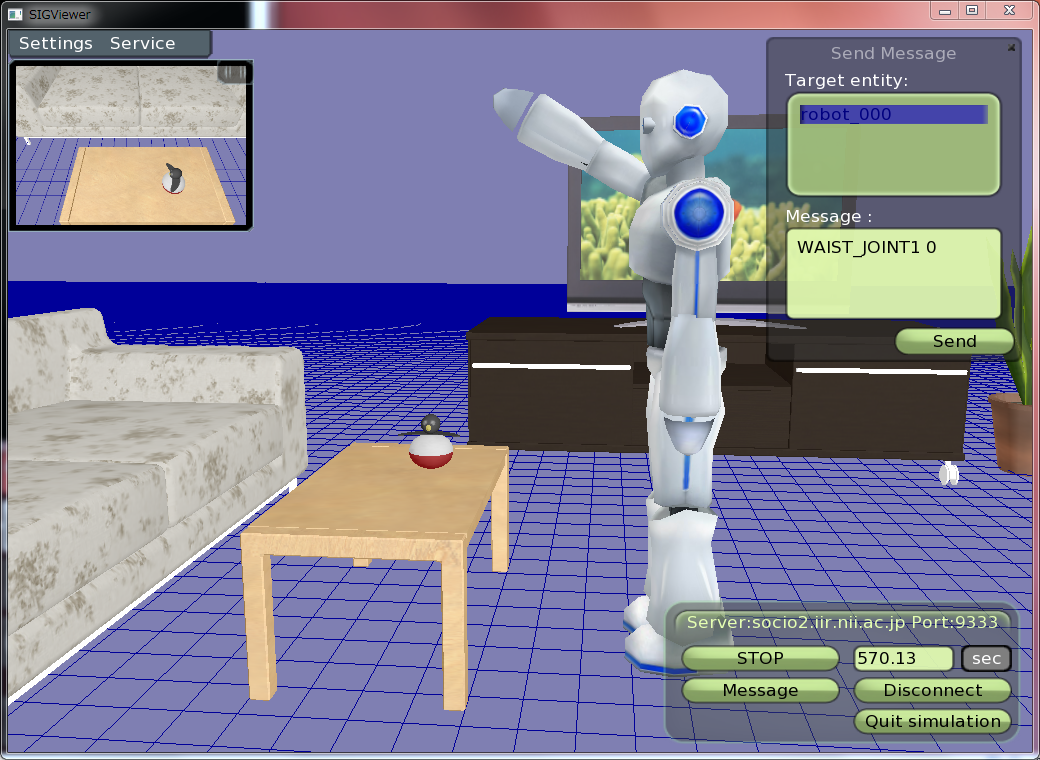
- request-to-SIGServer-from-theSIGViewer
- service libraries
- v2.1.0
- v2.3.0
- エージェントの衝突(v120330, v1.4.8)?
- エージェント視点の画像取得(v120330, v1.4.8)?
- エージェント視点の画像取得(v2.0系)?
- エージェント間のメッセージのやりとり(v120330, v1.4.8)?
- エージェント間のメッセージのやりとり(v2.0系)?
- キネクトによるエージェントの操作(v120330, v1.4.8)
- キネクトによるエージェントの操作(v2.0系)
- サービスプロバイダの作成
- サービスプロバイダの作成(.NET)
- サービスプロバイダの使用方法(v2.0系)
- テスト実行
- テスト実行(v120330, v1.4.8)
- テスト実行(v2.0系)
- ポートフォワーディングでサーバに接続する方法(v120330, v1.4.8)
- メッセージ送信ツールの作成(v120330, v1.4.8)
- ロボット・ダイナミクス(ヒューマノイド)
- ロボット・ダイナミクス(ヒューマノイド)_v1.4.8
- ロボット・ダイナミクス(単純モデル)
- ロボット・ダイナミクス(単純モデル) v120330 v1.4.8
- 世界ファイルパラメータ一覧?
- 人間型エージェントの操作(v120330, v1.4.8)
- 人間型エージェントの操作(v2.0系)
- 動力学シミュレーションのサンプル
- 動力学シミュレーションのサンプル(v120330, v1.4.8)
- 動力学シミュレーションのサンプル(v2.0系)
- 物体を持つ動作(v120330, v1.4.8)?
- 物体を持つ動作(v2.0系)?
- 画像、距離センサデータ取得
- 眼球運動?
- 第27回日本ロボット学会学術講演会?
- 自作の形状ファイルの読み込み
- 自作の形状ファイルの読み込み(v1.4.8)
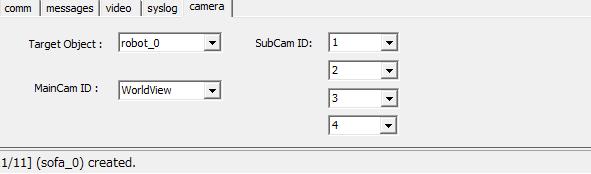
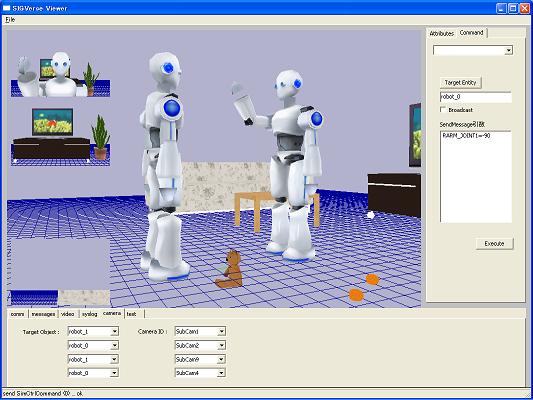
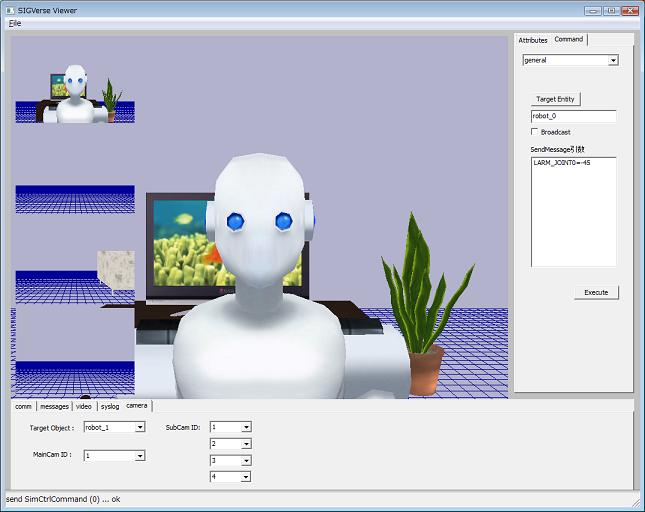
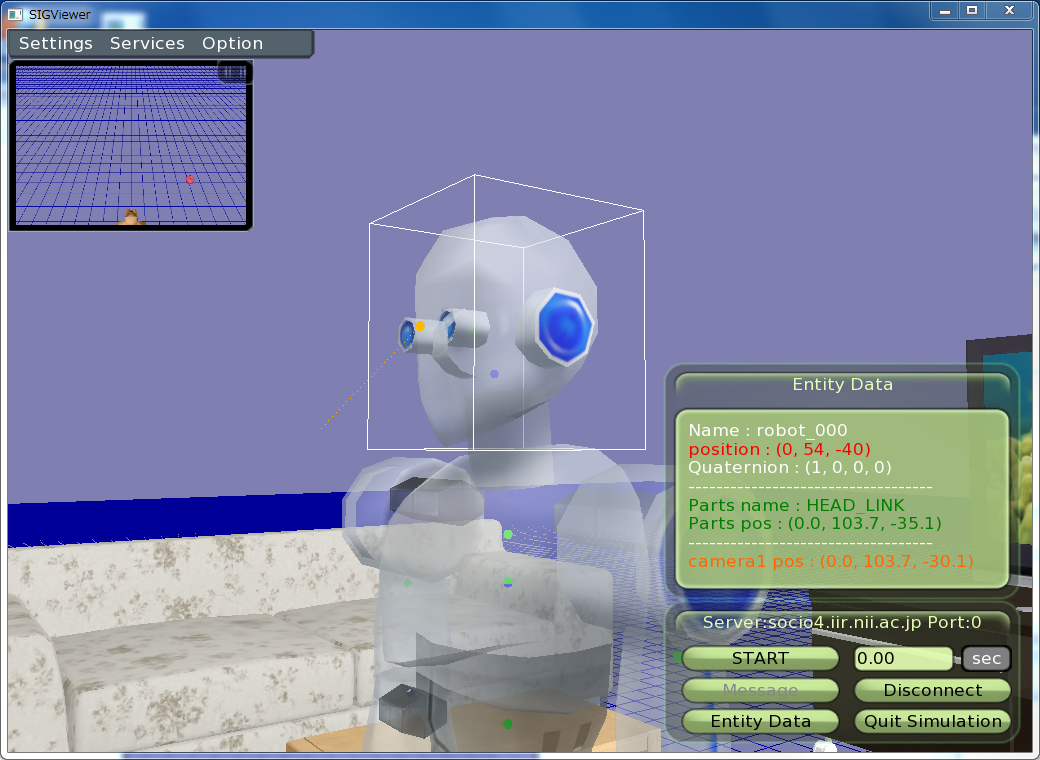
- 複数個のカメラ設置
- 視覚に関する操作
- 視覚に関する操作(v120330, v1.4.8)
- 視覚に関する操作(v2.0系)
- 距離センサ(v120330, v1.4.8)?
- 距離センサ(v2.0系)?
- 車輪移動ロボット(v120330 v1.4.8)?
- 車輪移動ロボット_v2.1.0?
- 音声認識?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}