- (HSR)Cleanupタスクの実行
- (HSR)キーボードで操作する
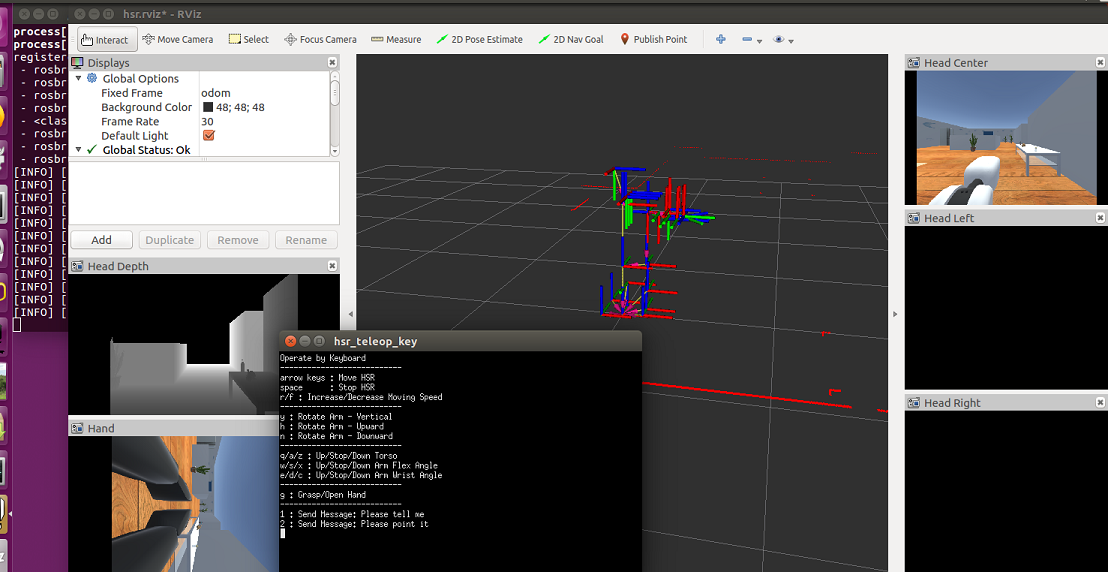
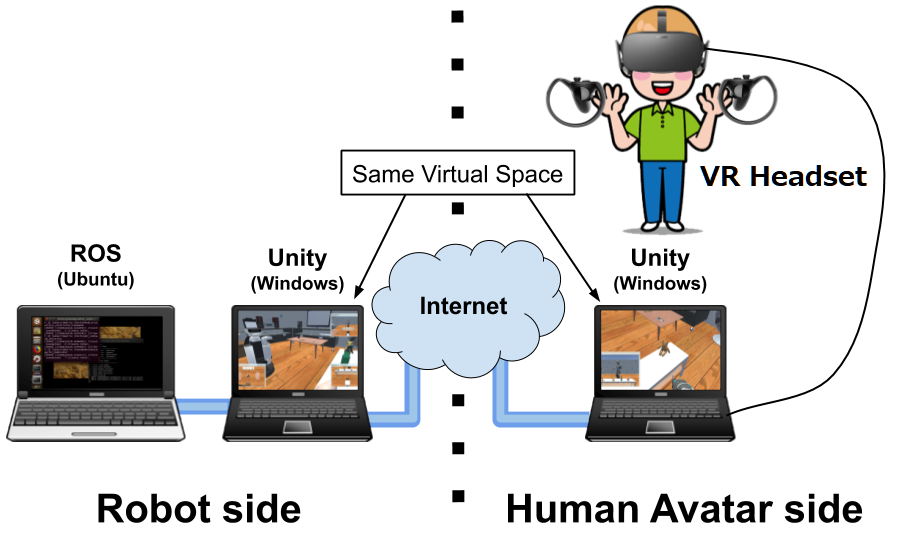
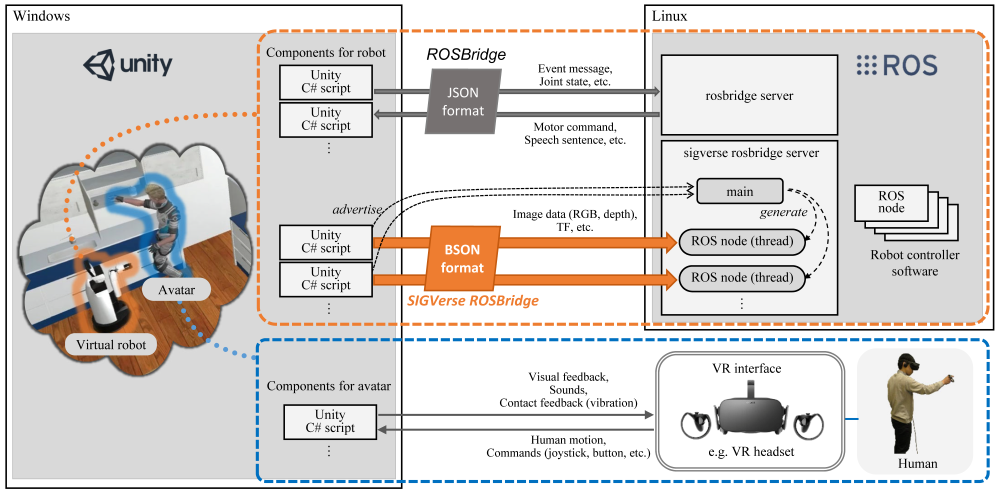
- (HSR)クラウドとVRを使用したCleanupタスクの実行
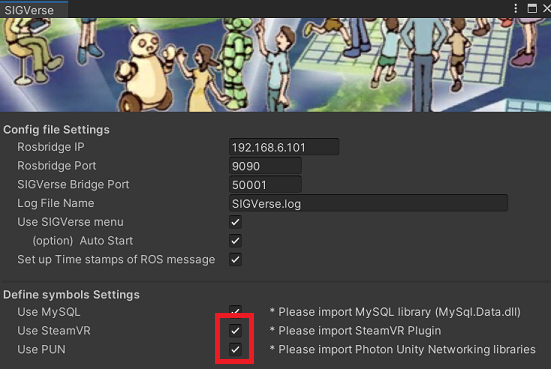
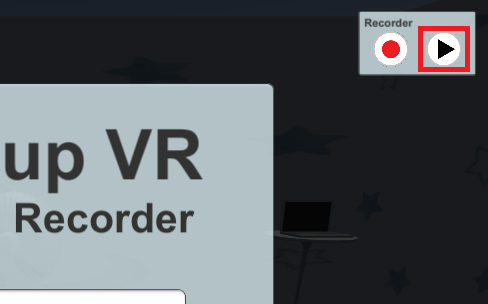
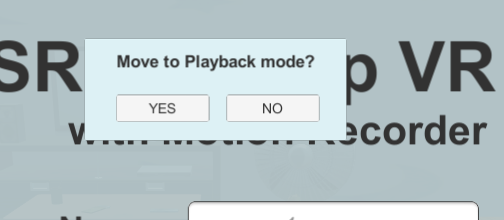
- (HSR)クラウドとVRを使用したCleanupタスクの実行(記録・再生機能付き)
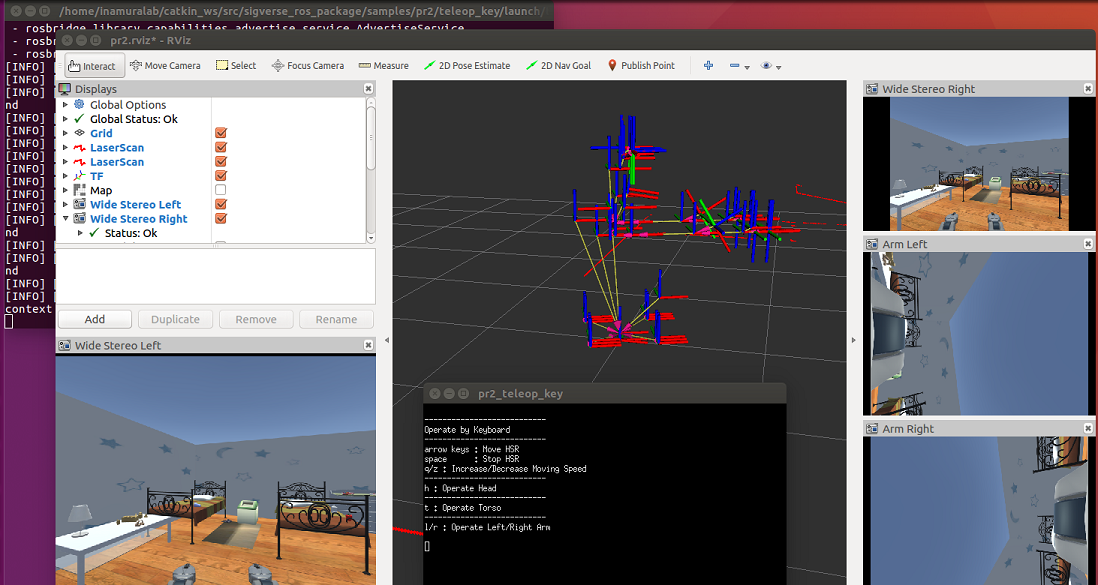
- (PR2)キーボードで操作する
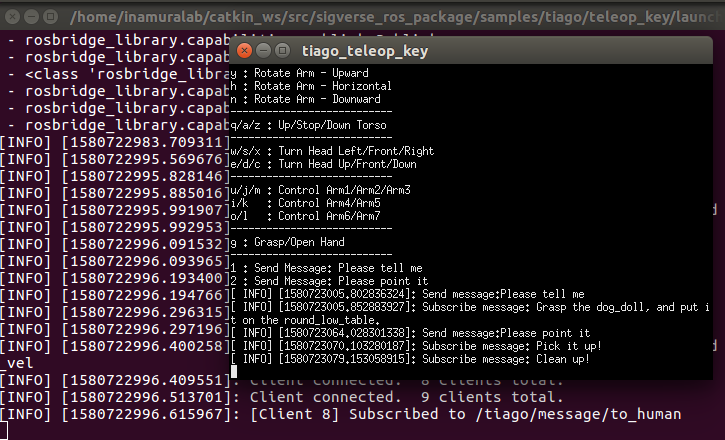
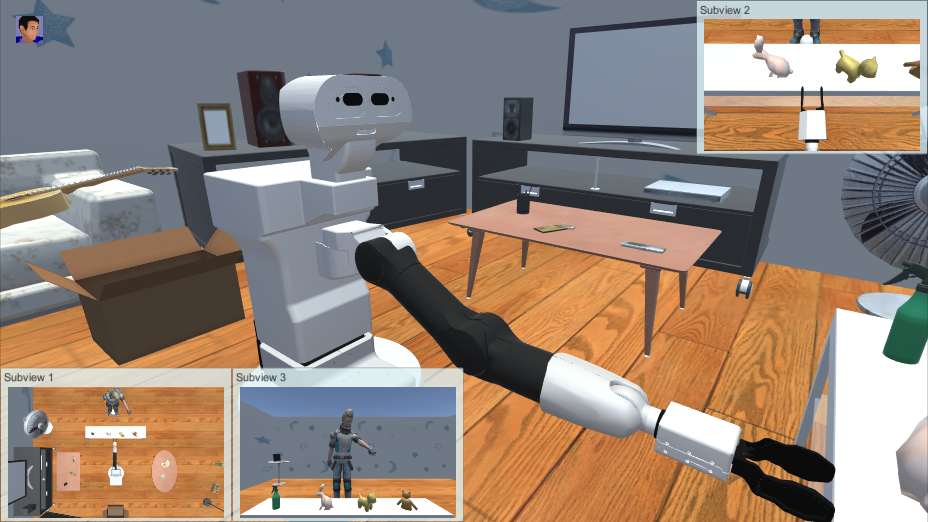
- (TIAGo)Cleanupタスクの実行
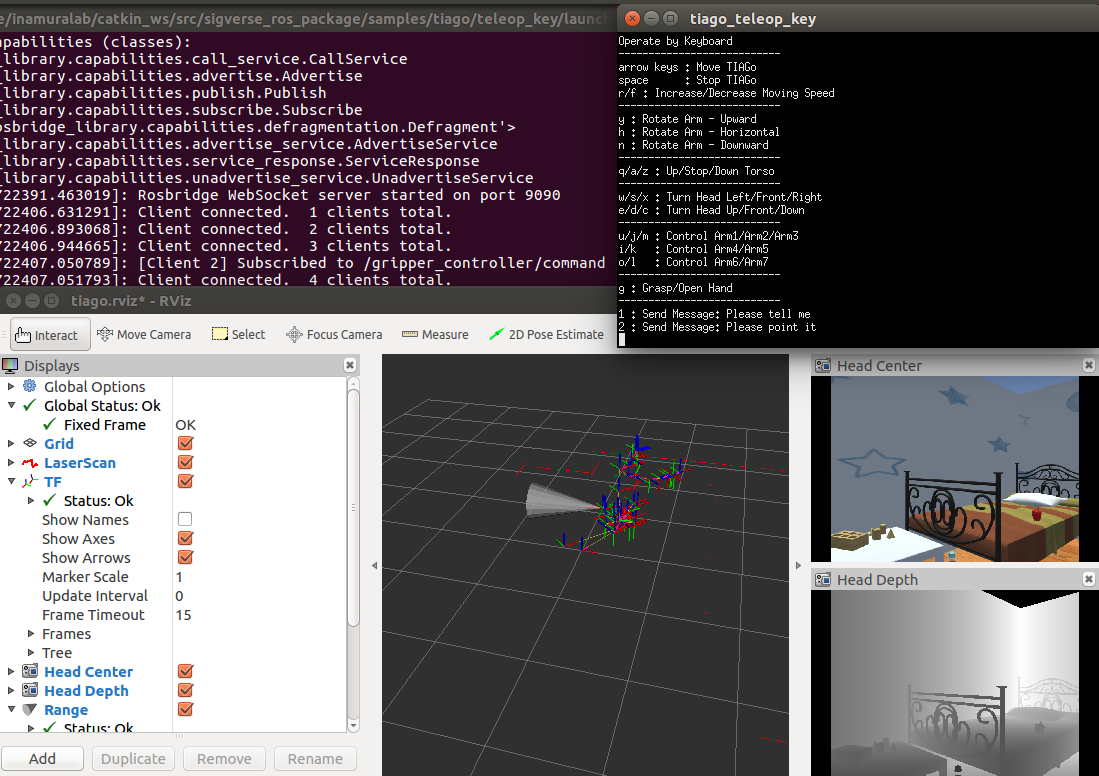
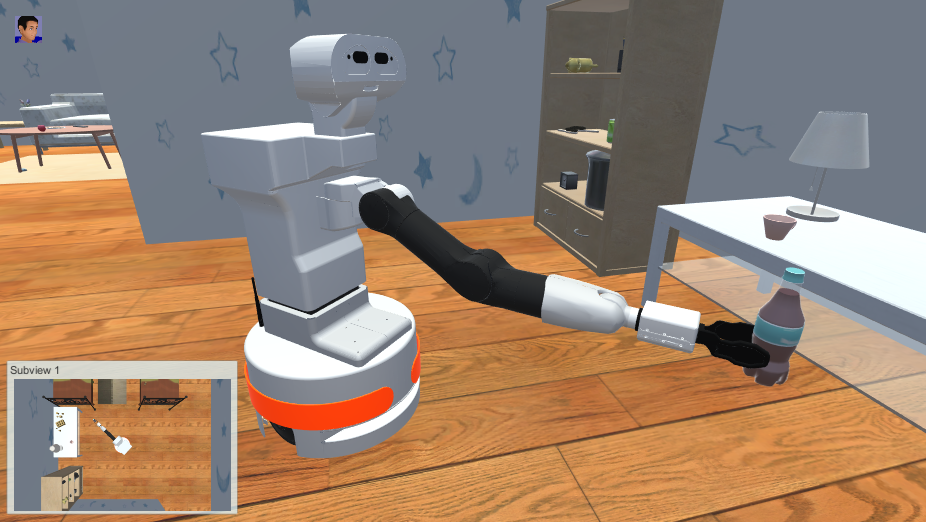
- (TIAGo)キーボードで操作する
- (TurtleBot3)SLAMの実行
- (TurtleBot3)人間が指差す方向を認識する
- (TurtleBot3)把持する(キーボード操作)
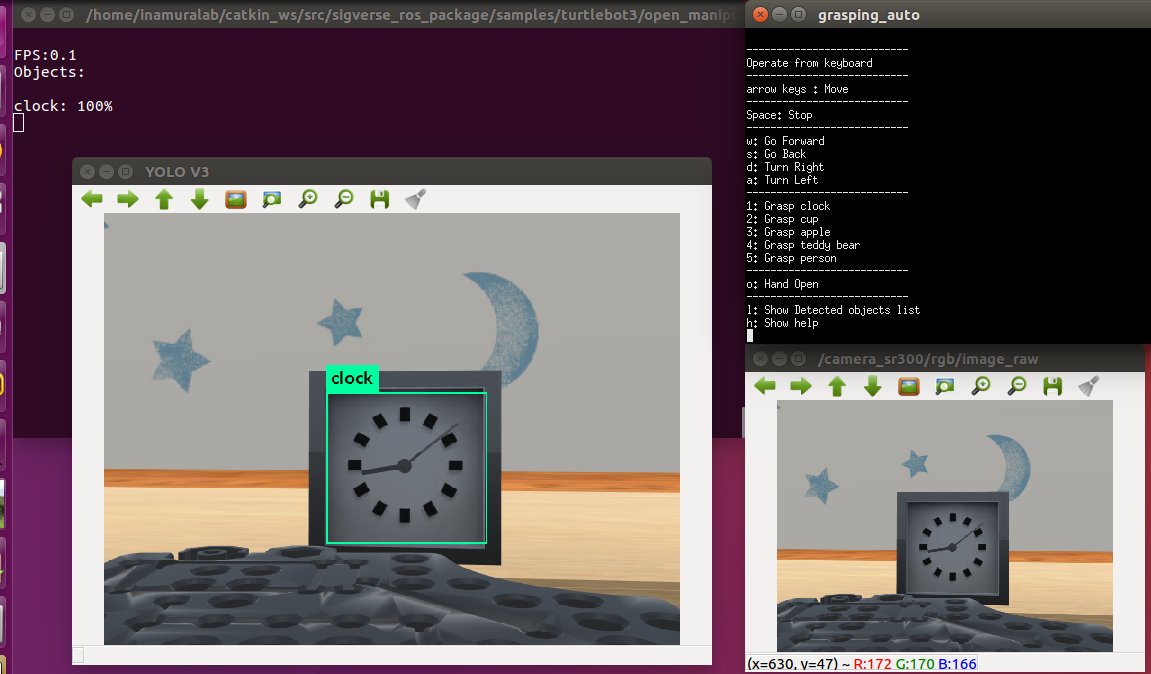
- (TurtleBot3)把持する(自動把持)
- (Turtlebot2)キーボードで操作する
- (Turtlebot2)人間を追従する
- API一覧
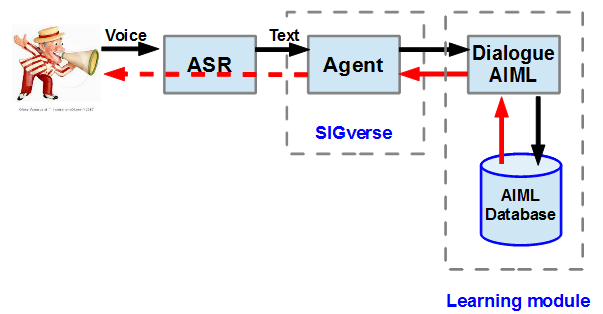
- Action Learning system based on AIML
- BVHファイルの読み込み
- BVHファイルの読み込み(v120330, v1.4.8)
- BVHファイルの読み込み(v2.0系)
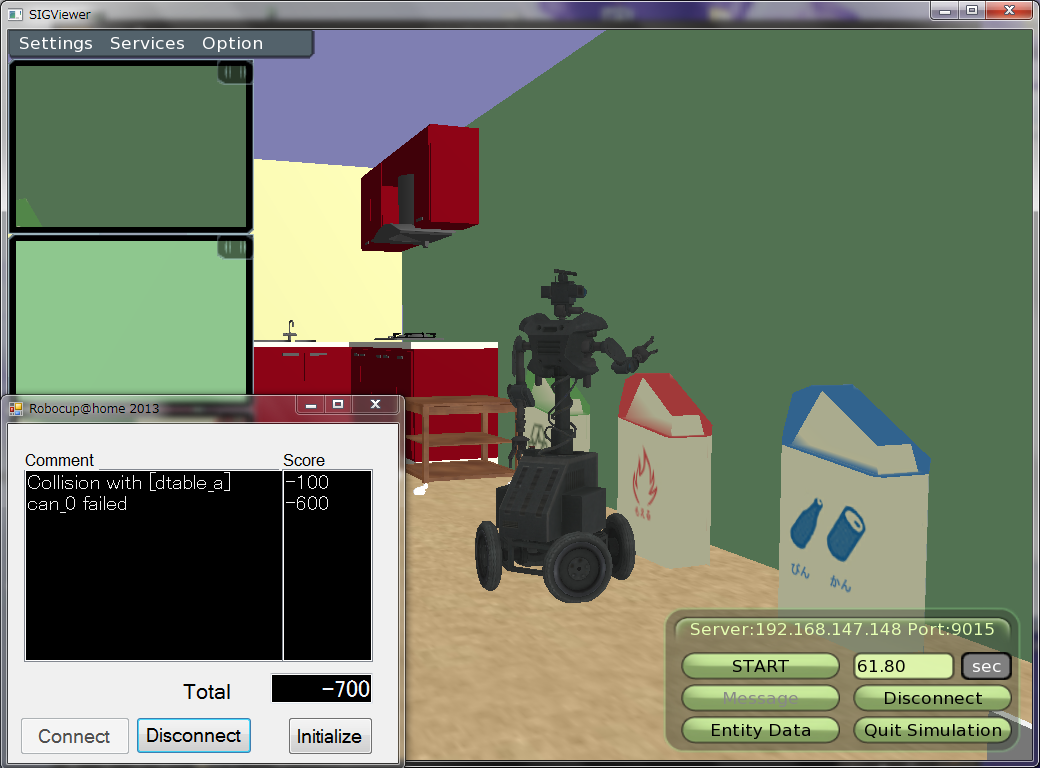
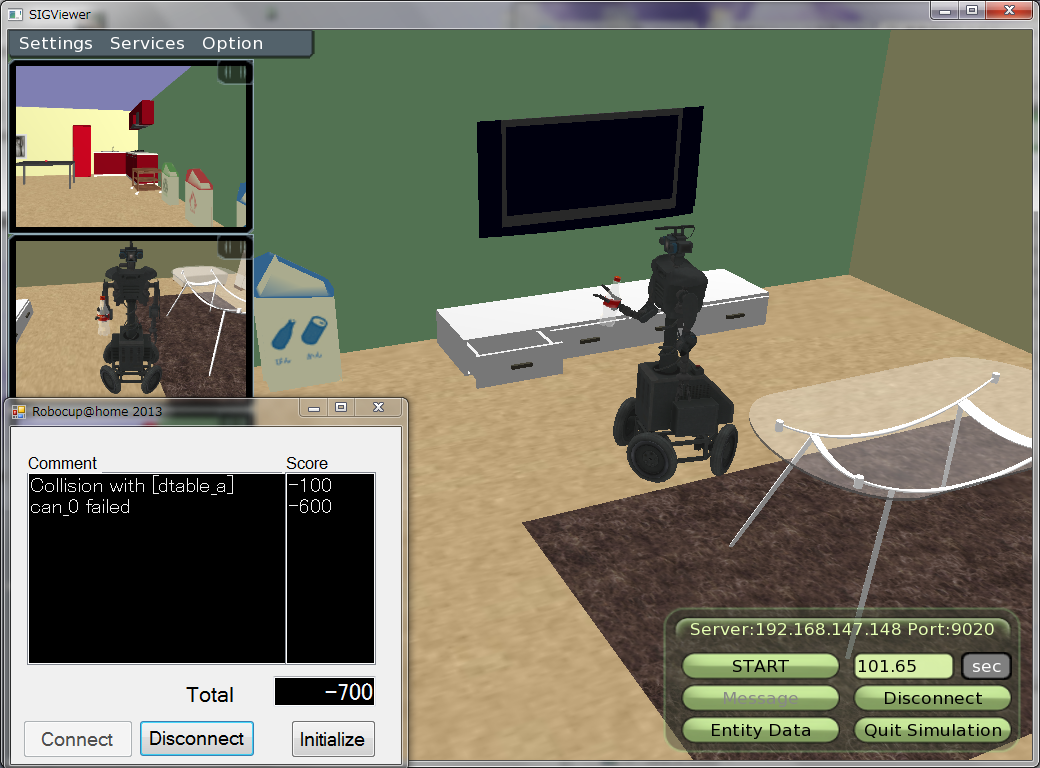
- Clean Up Task Sample 1, 2
- Clean Up Task Sample 3
- Connect to SIGVerse server via socket using Winsock?
- Document for ver.2
- Dynamics simulation
- HMD+KINECT
- HMD+KINECT(v2.0系)
- HMDサービス
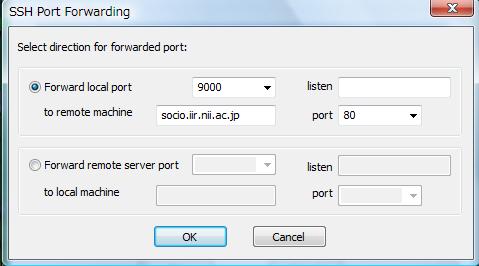
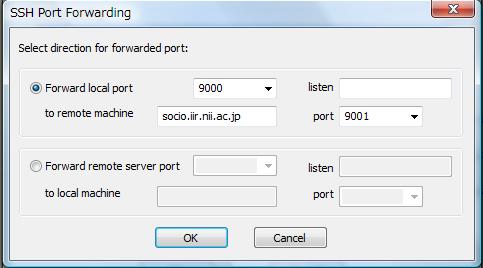
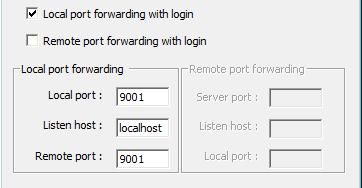
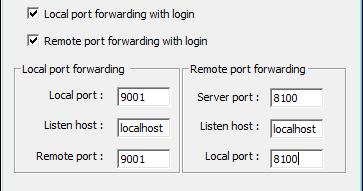
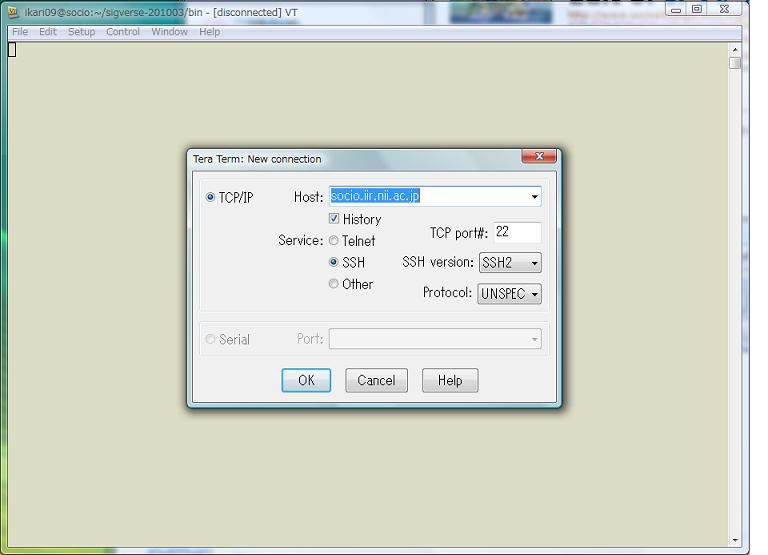
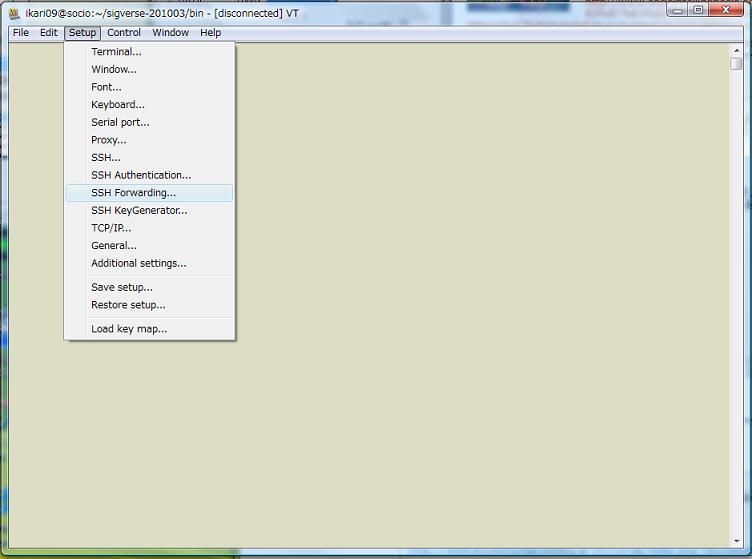
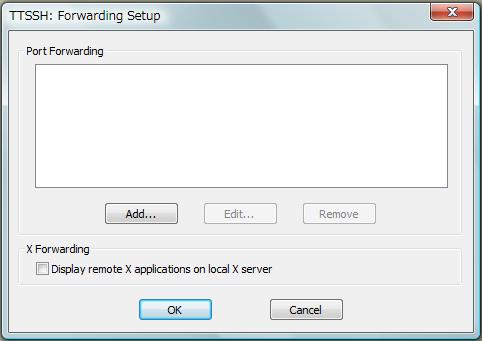
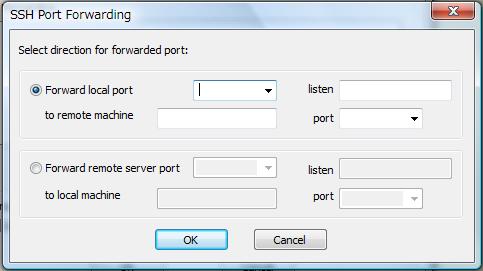
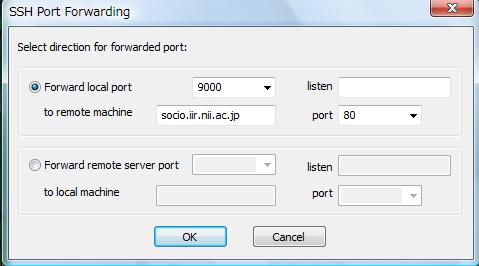
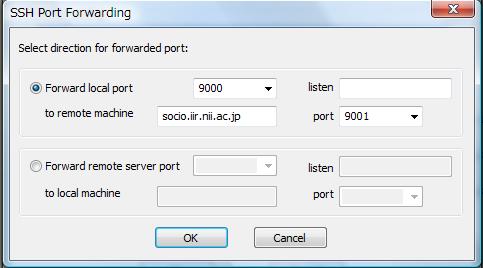
- How to connect to server via port forwarding?
- Humanoid agent operations?
- JSAIConf2009
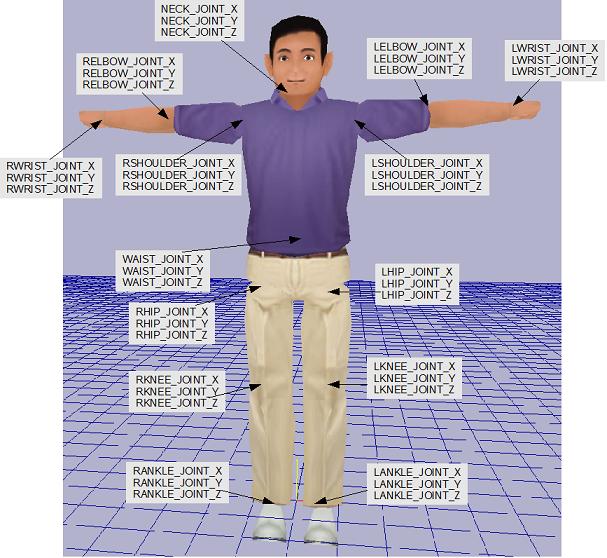
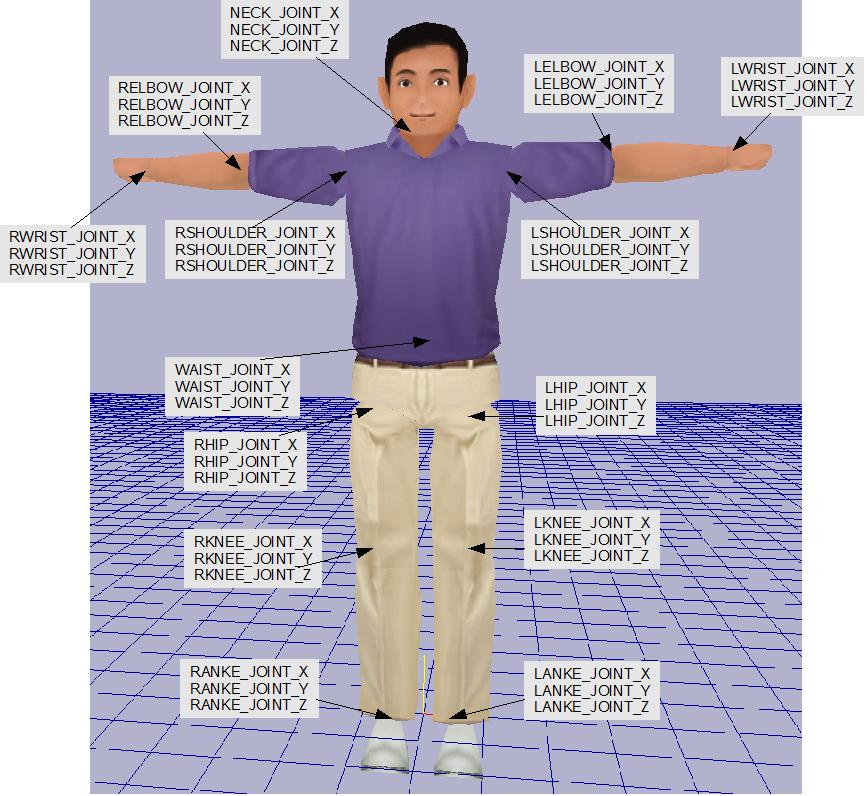
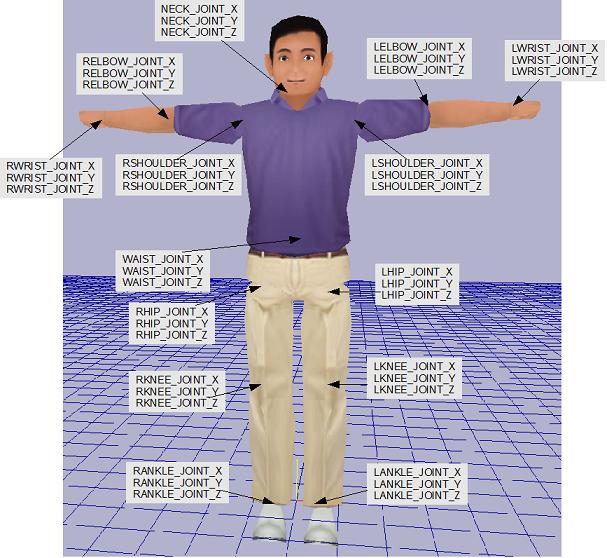
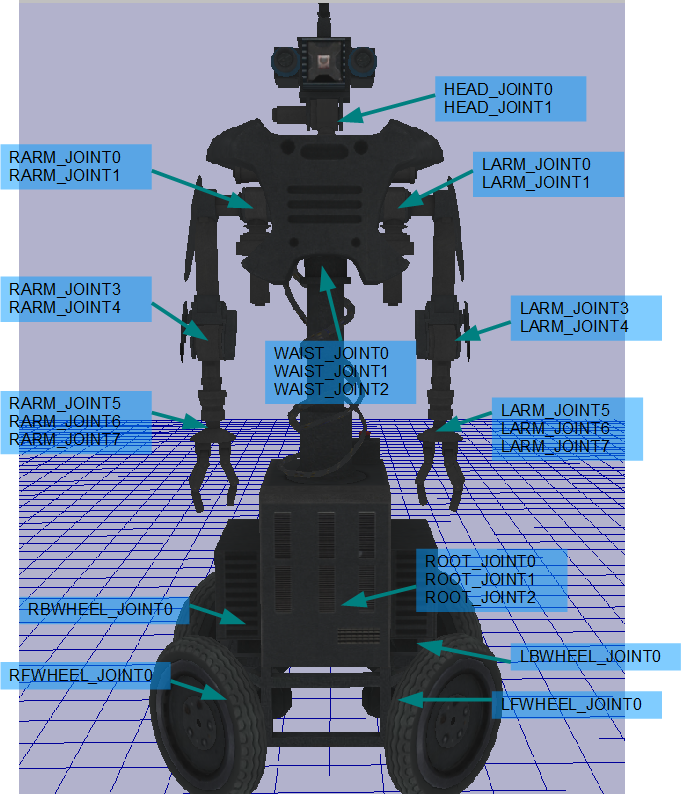
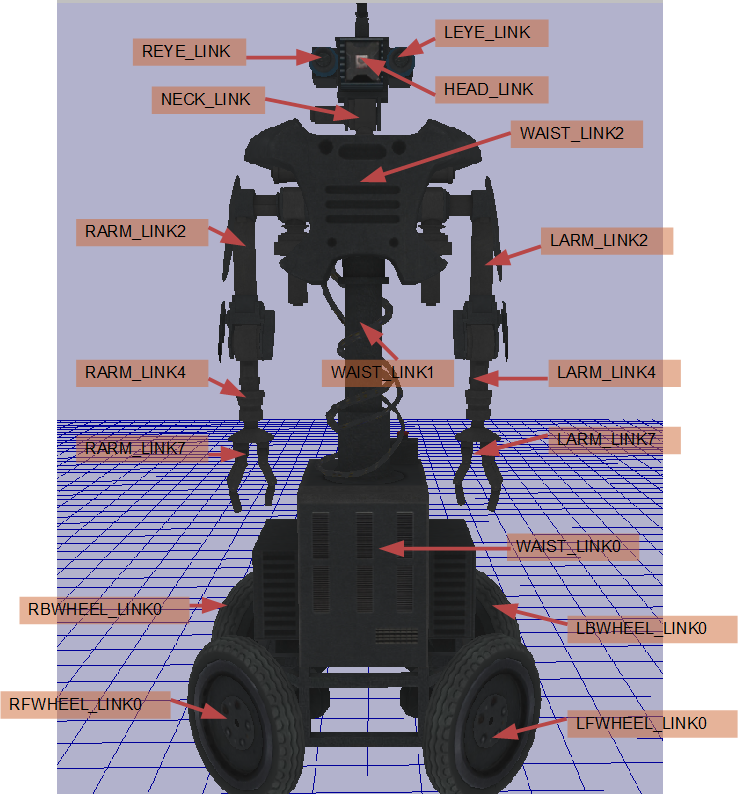
- Joint定義一覧
- KINECTサービス
- NII Open House
- Oculus Quest 2のハンドトラッキングでVRoidアバターの指を動かす
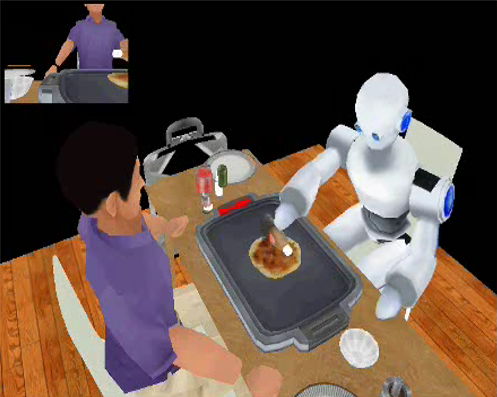
- Okonomiyaki Collaborative Cooking Agent
- PressRelease
- Publication for ver.2
- ROSノードの利用
- Robomec2009
- Run Test Sample?
- SIGVerse
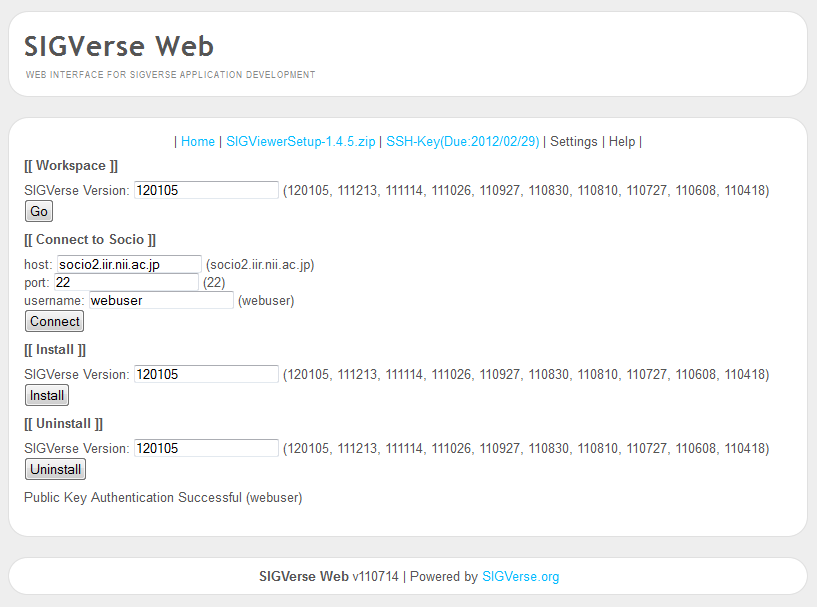
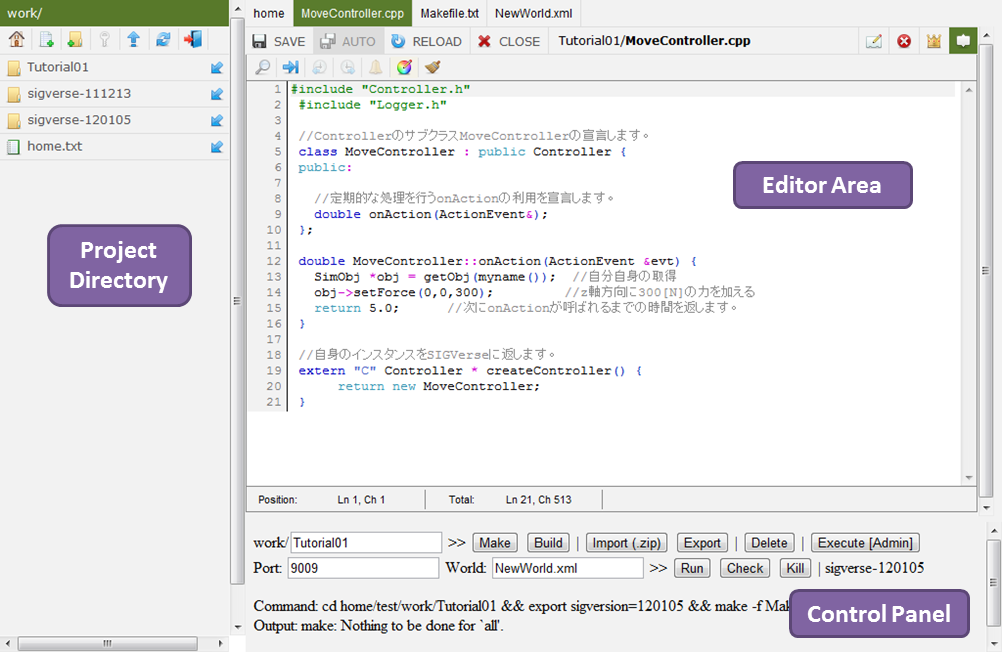
- SIGVerse Web
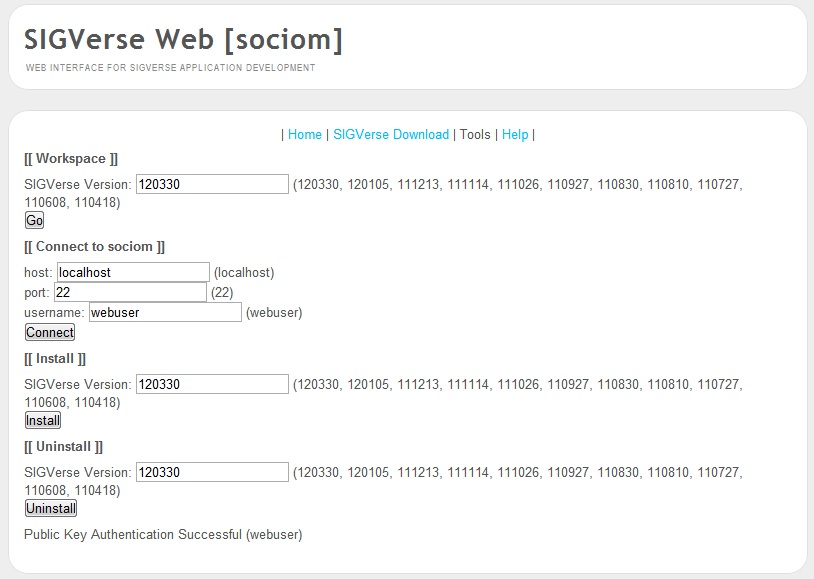
- SIGVerse Web (創発システムシンポジウム専用情報)
- SIGVerse v2.1.0
- SIGVerse(English)?
- SIGVerseのインストール
- SIGVerseのインストール(NIIサーバ)_2.0.3
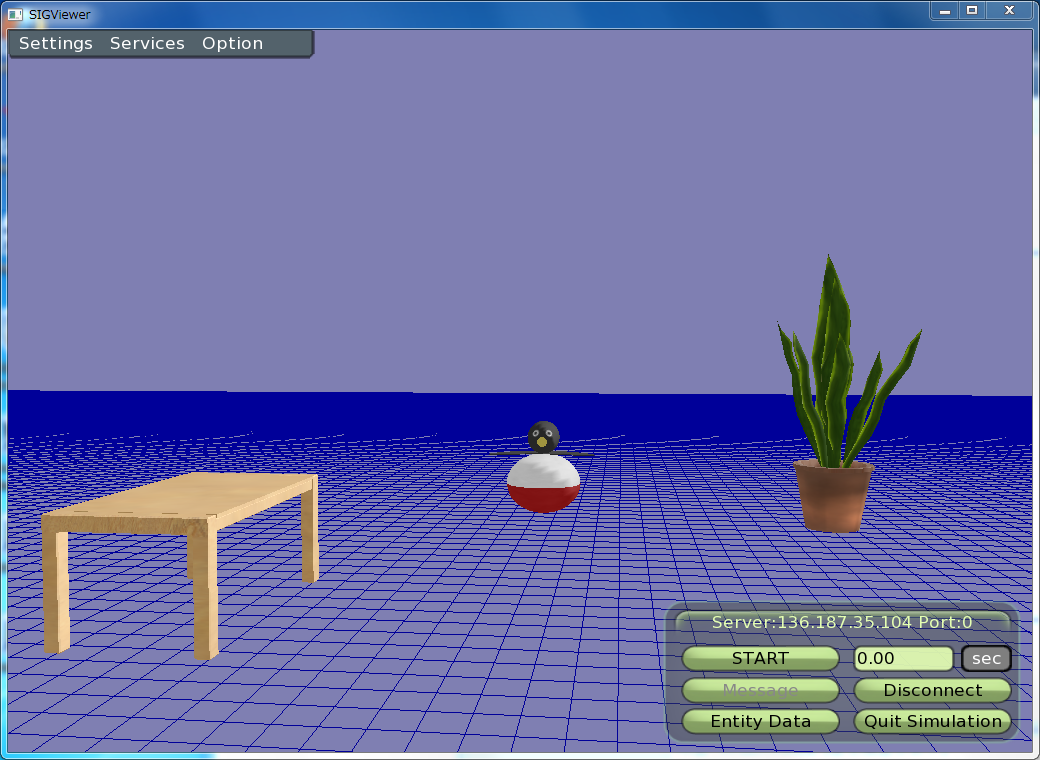
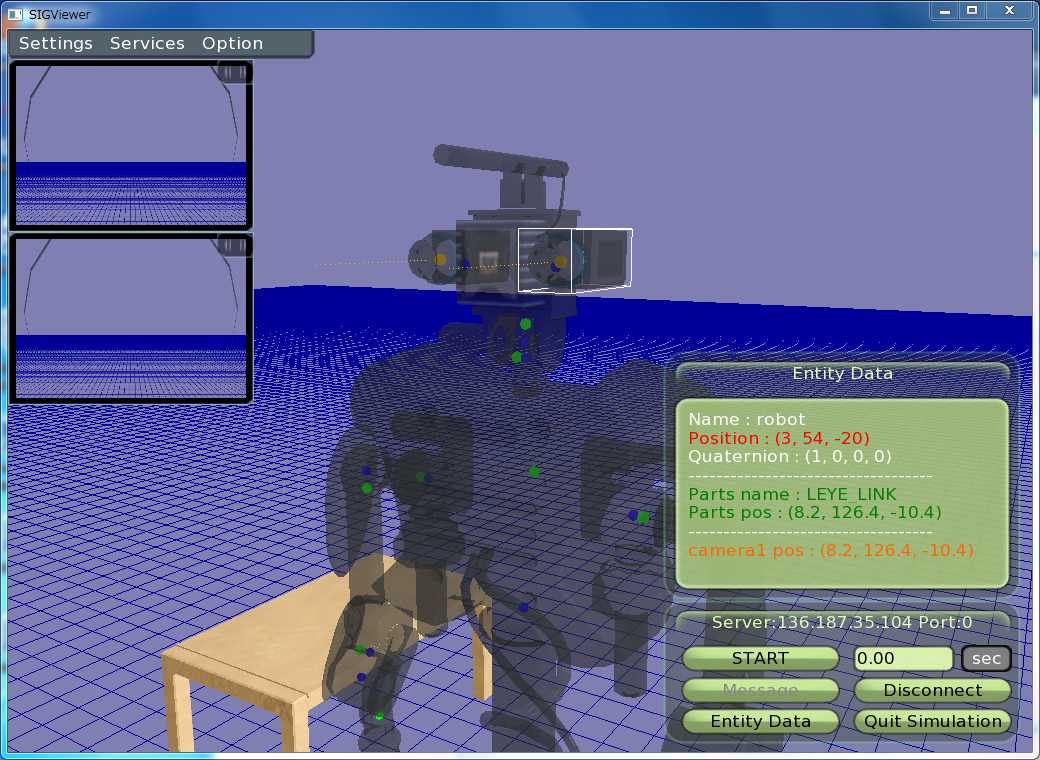
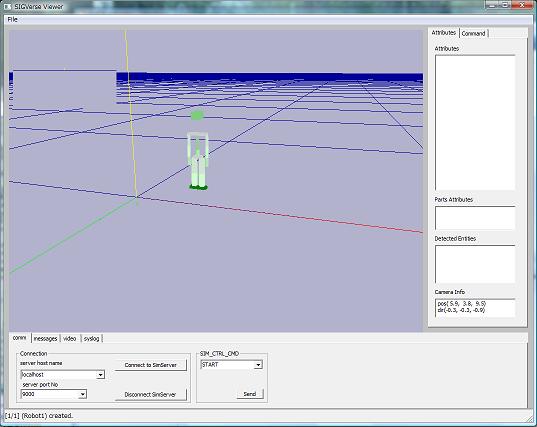
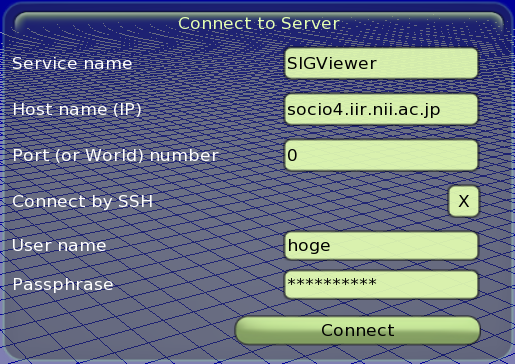
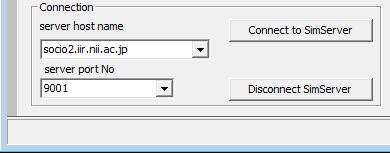
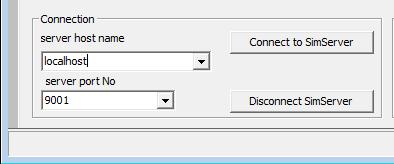
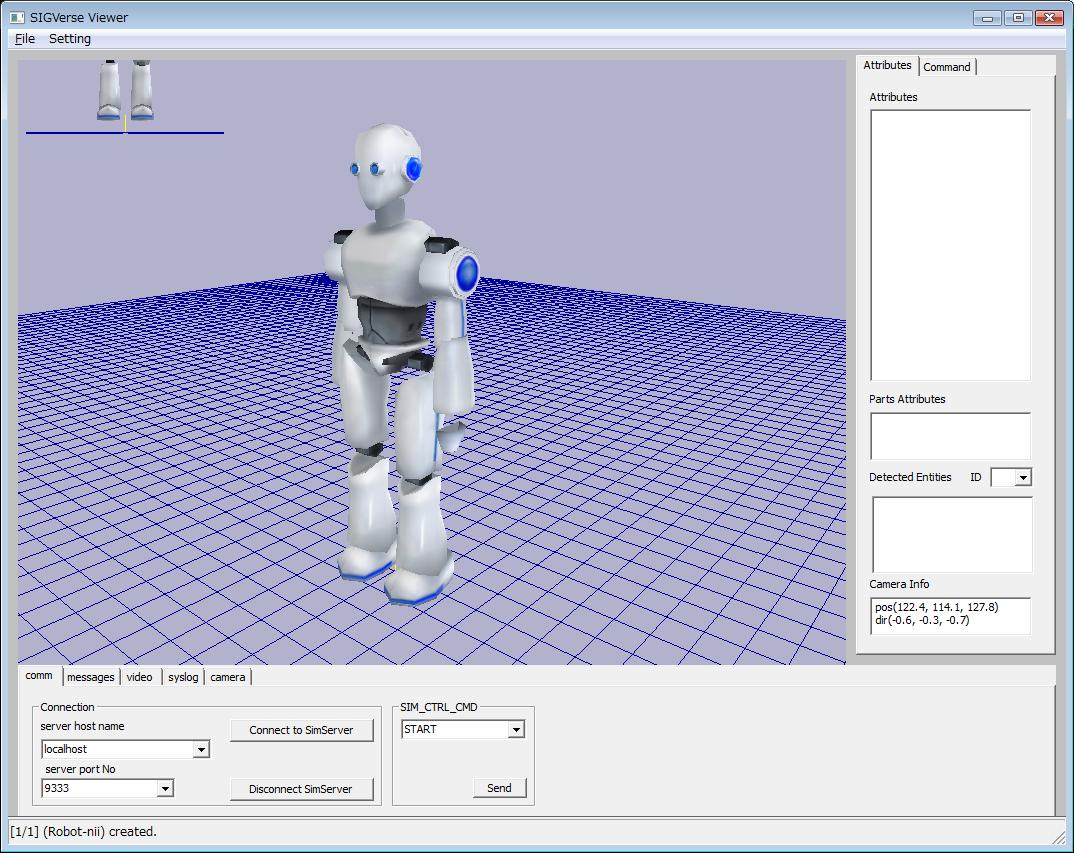
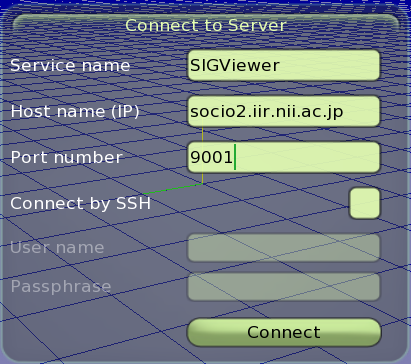
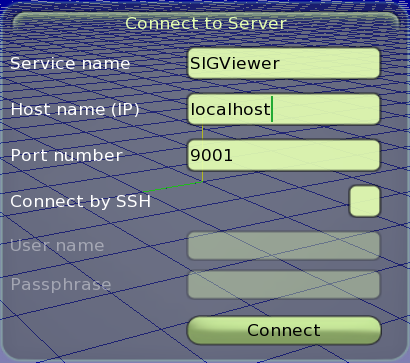
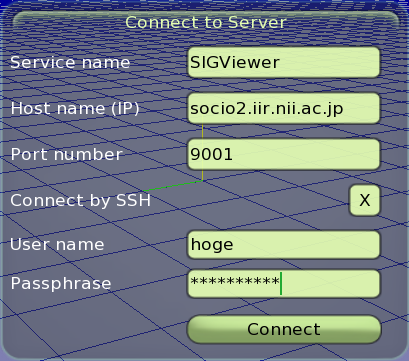
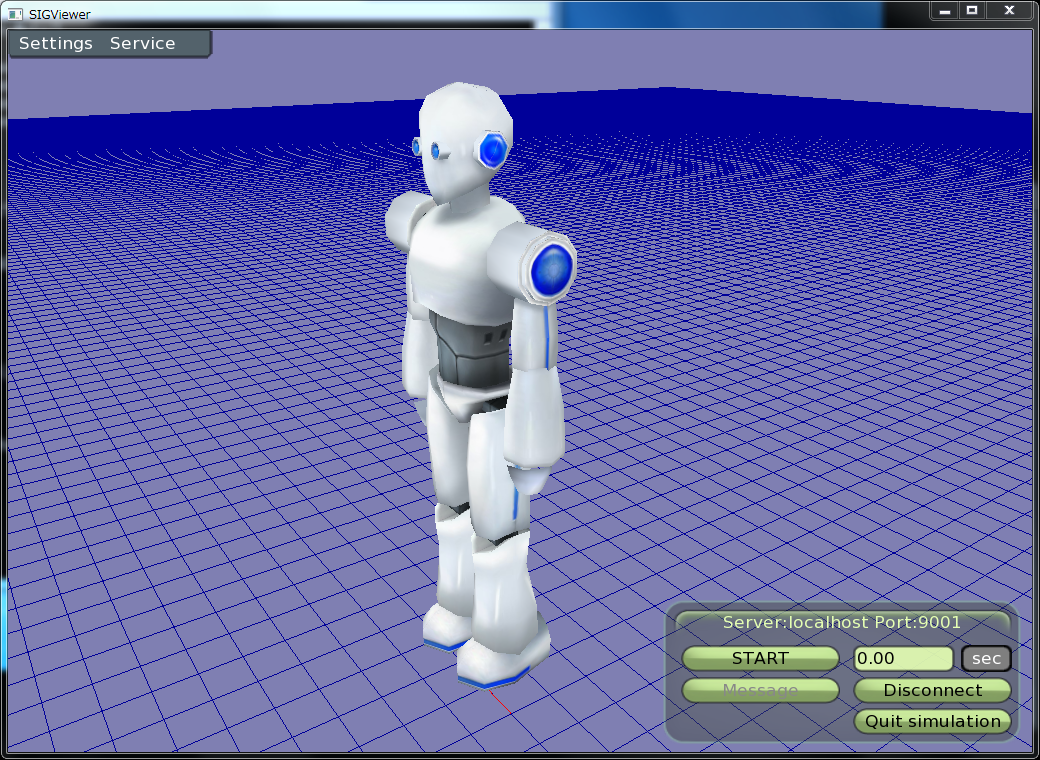
- SIGViewer
- SSH接続(v120330, v1.4.8)
- Samples of the dynamics simulations.?
- Samples/Communication between agents?
- Samples/Control of humanoid agent?
- Samples/Speech recognition?
- Speech_Recognition_using_Microsoft_SAPI?
- System
- TeraTermによるポートフォワーディングの設定
- Tutorial for ver.2
- Tutorial for ver.2/Configuration
- Tutorial for ver.3
- Tutorial using ROS for ver.3
- Tutorial/Execution of test?
- v2.3.0
- エージェントの衝突(v120330, v1.4.8)
- エージェントの衝突(v2.0系)
- エージェント視点の画像取得(v120330, v1.4.8)
- エージェント視点の画像取得(v2.0系)
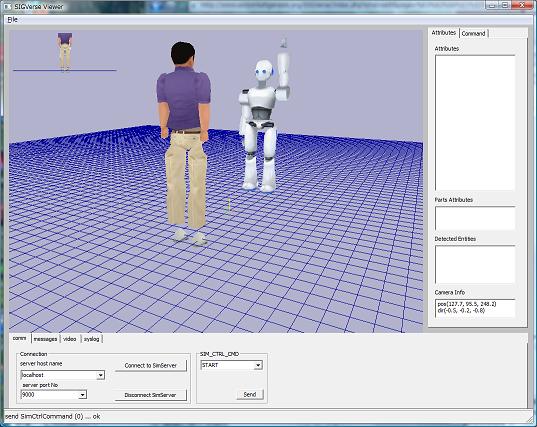
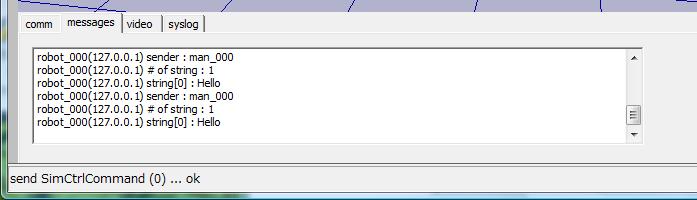
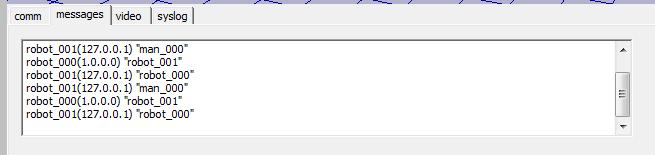
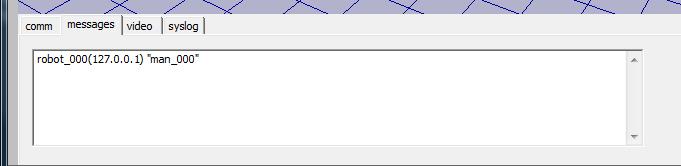
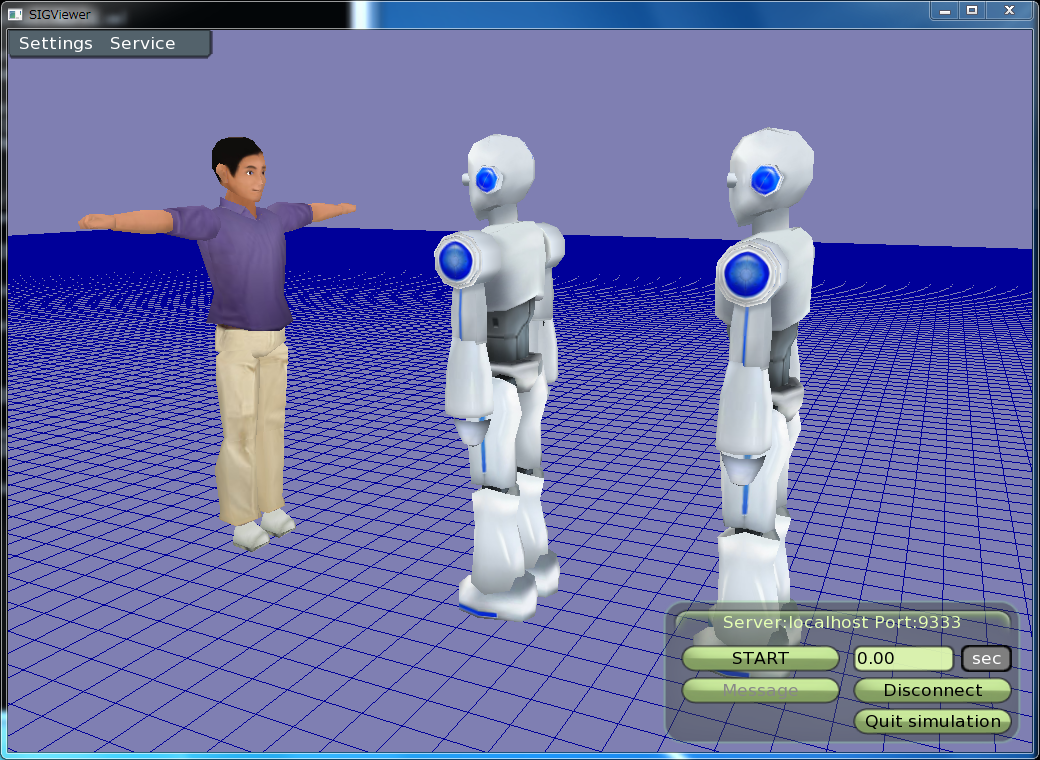
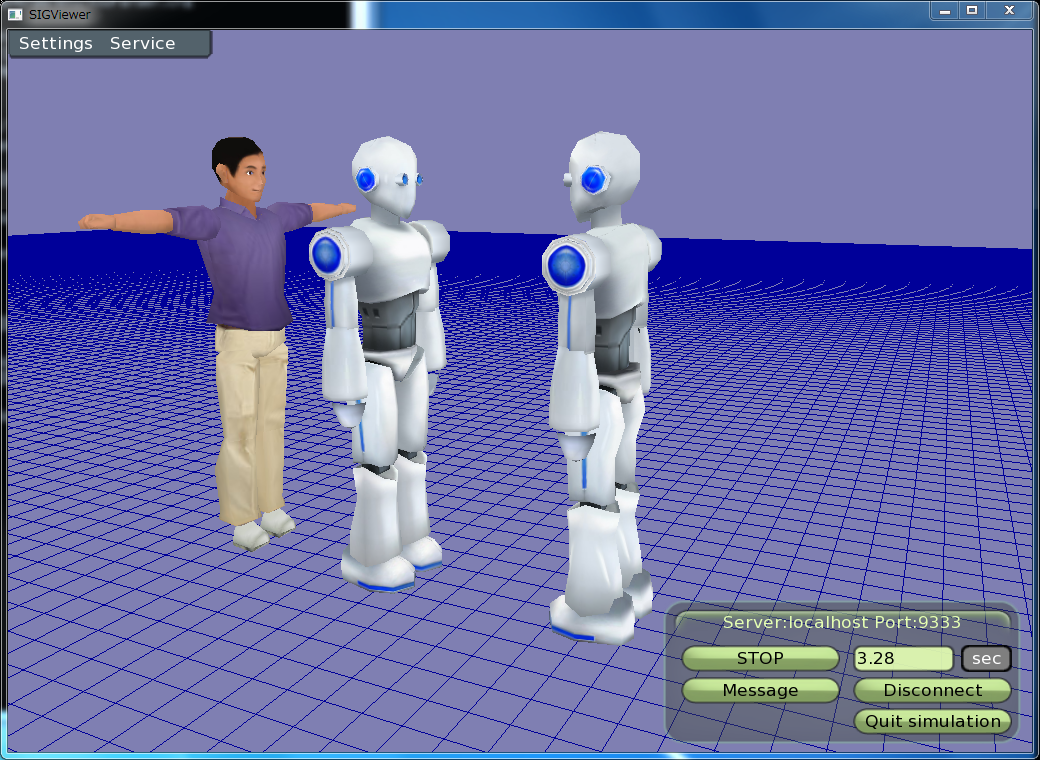
- エージェント間のメッセージのやりとり(v120330, v1.4.8)
- エージェント間のメッセージのやりとり(v2.0系)
- キネクトによるエージェントの操作(v120330, v1.4.8)
- キネクトによるエージェントの操作(v2.0系)
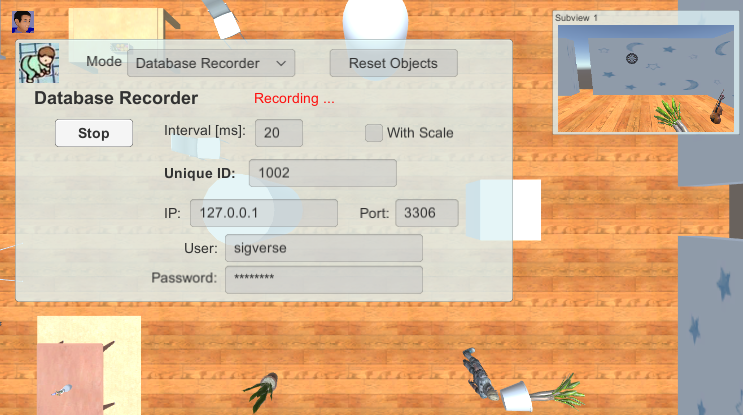
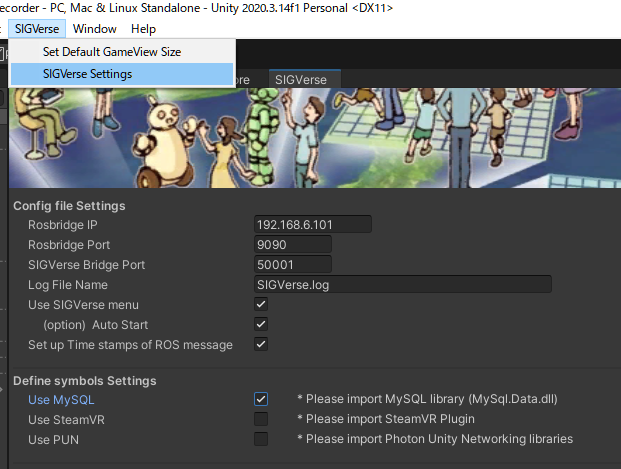
- キャラクター動作の記録・再生を行う(MySQLに保存)
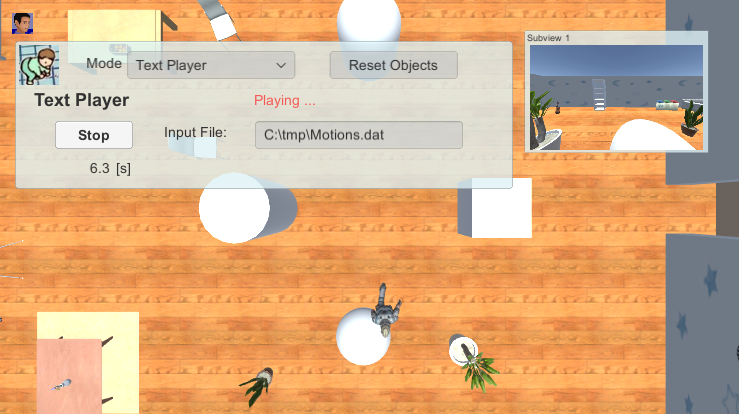
- キャラクター動作の記録・再生を行う(テキストファイルに保存)
- サービスプロバイダの作成
- サービスプロバイダの作成(.NET)
- サービスプロバイダの使用方法(v2.0系)
- サービスライブラリ
- テスト実行
- テスト実行(v120330, v1.4.8)
- テスト実行(v2.0系)
- ポートフォワーディングでサーバに接続する方法(v120330, v1.4.8)
- メッセージ送信ツールの作成(v120330, v1.4.8)
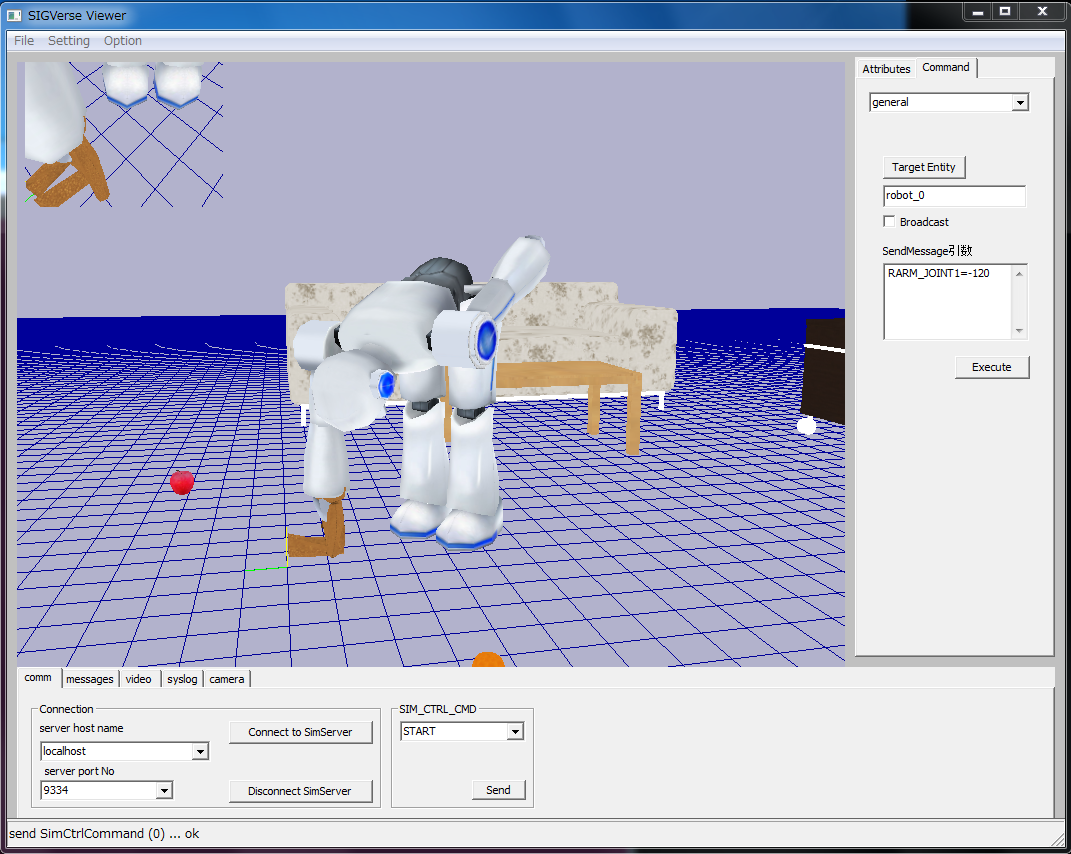
- ロボット・ダイナミクス(ヒューマノイド)
- ロボット・ダイナミクス(ヒューマノイド)_v1.4.8
- ロボット・ダイナミクス(単純モデル)
- ロボット・ダイナミクス(単純モデル) v120330 v1.4.8
- 一人称視点で歩行する
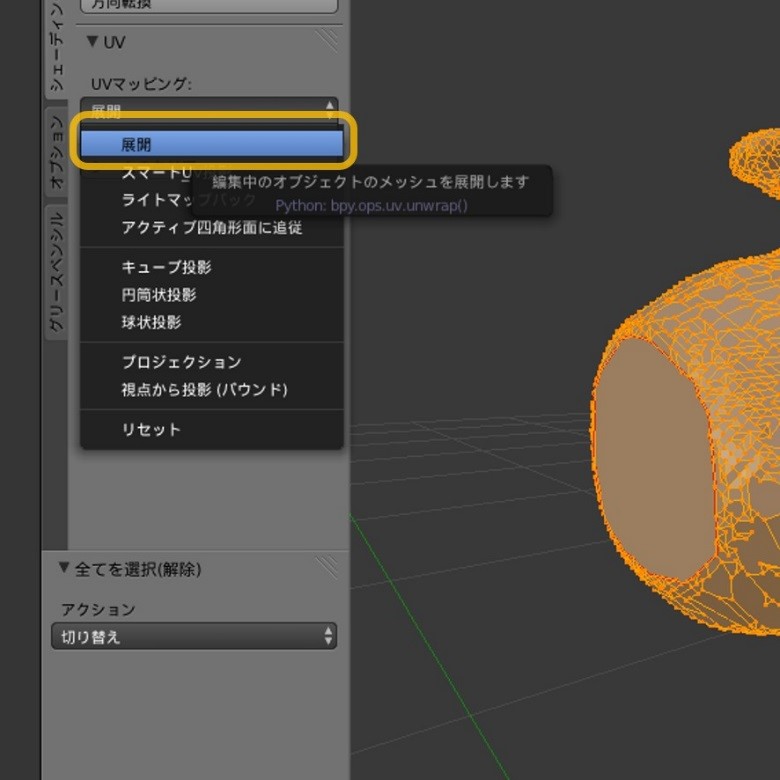
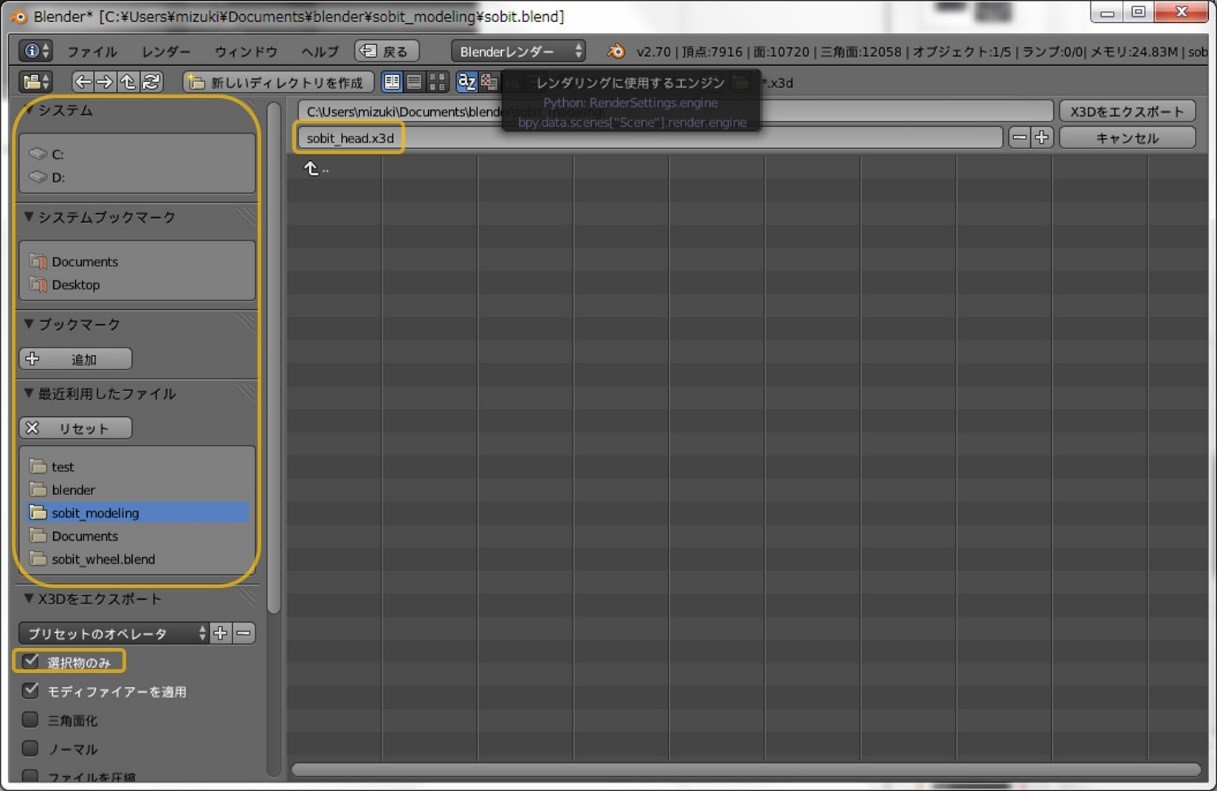
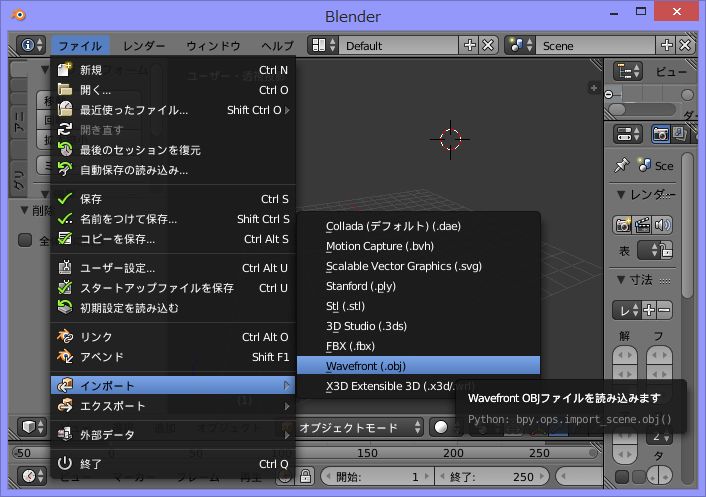
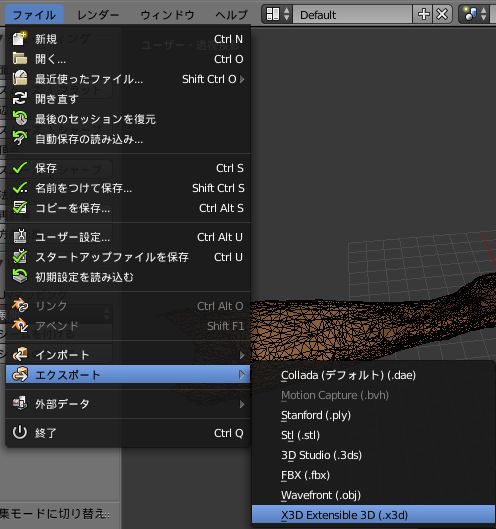
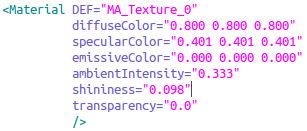
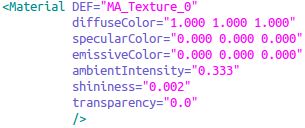
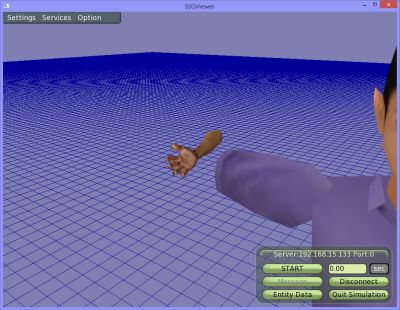
- 一般的な形状ファイルのSIGVerse用X3D形式への変換
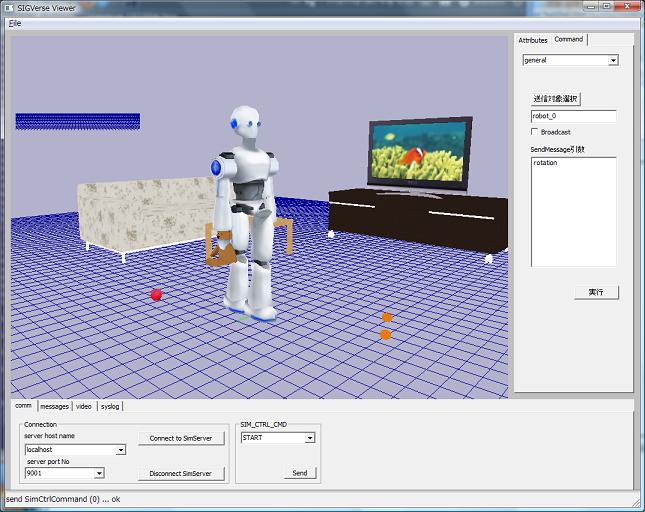
- 人間型エージェントの操作(v120330, v1.4.8)
- 人間型エージェントの操作(v2.0系)
- 動力学シミュレーションのサンプル
- 動力学シミュレーションのサンプル(v120330, v1.4.8)
- 動力学シミュレーションのサンプル(v2.0系)
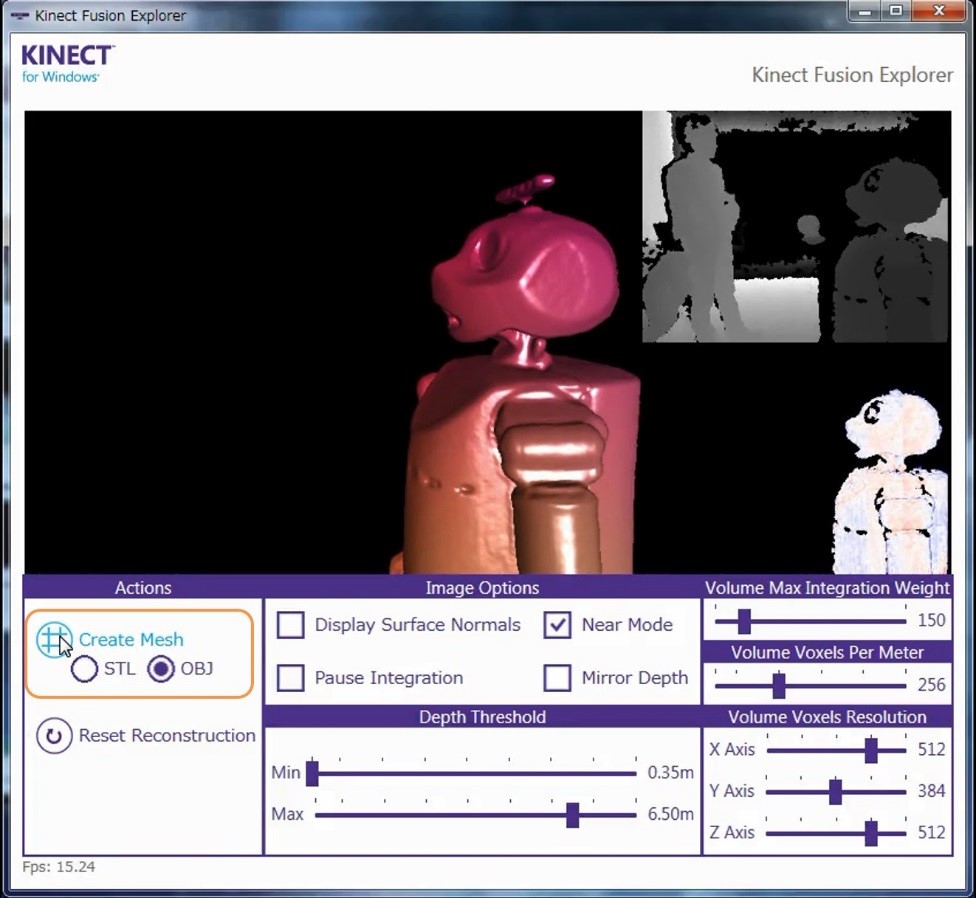
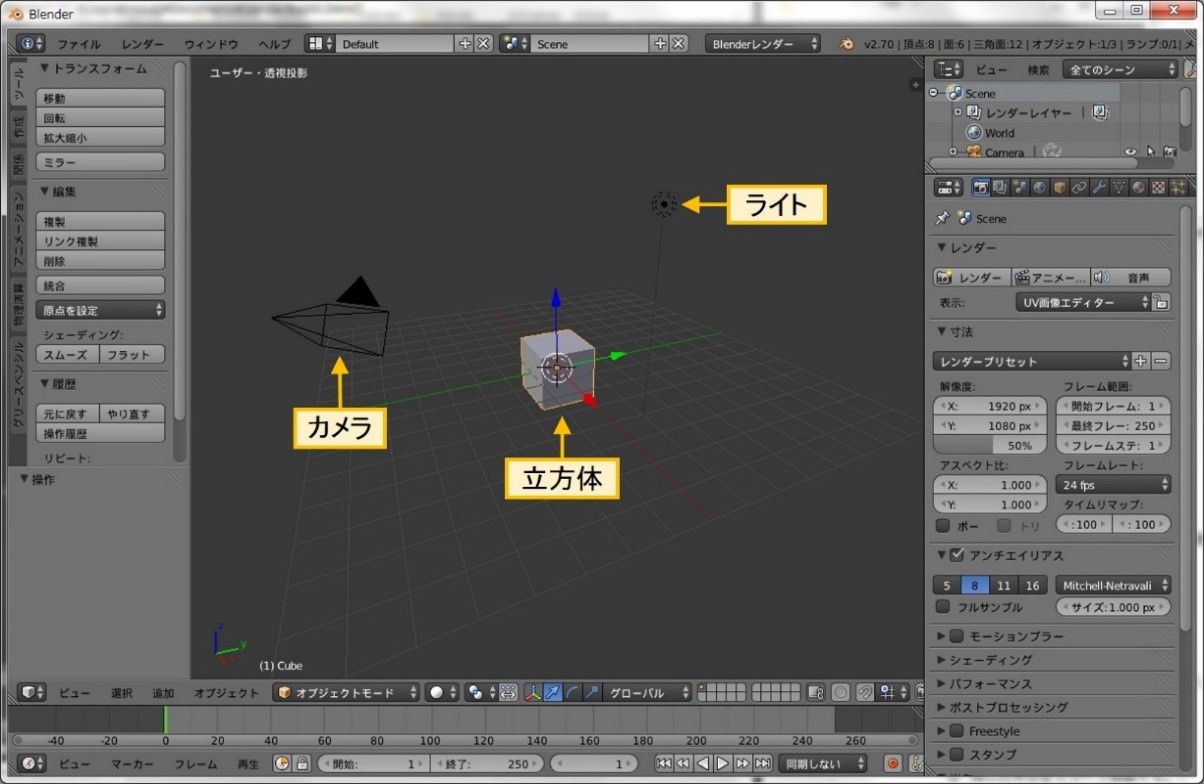
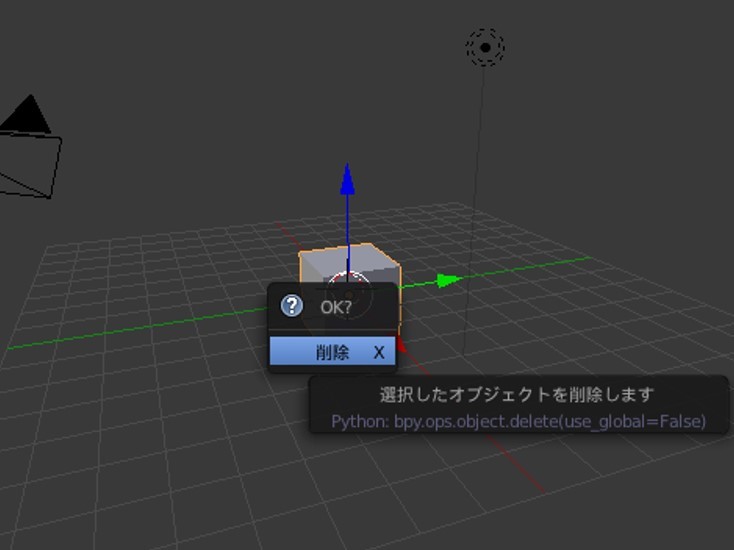
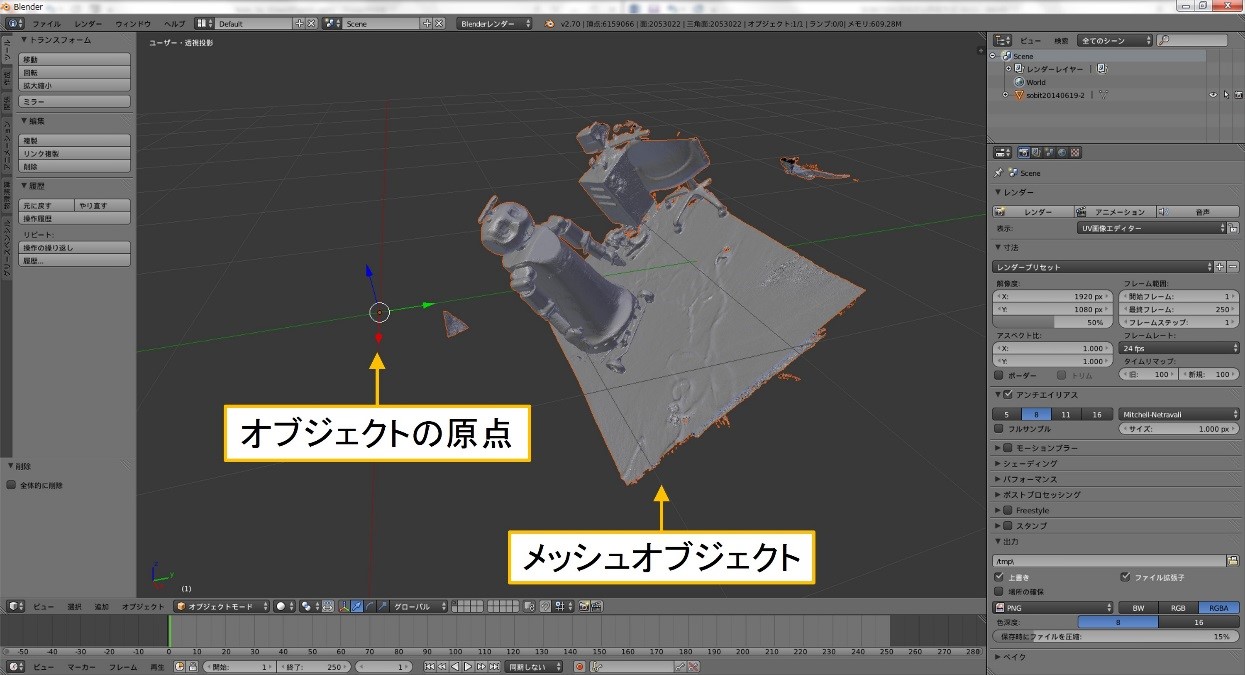
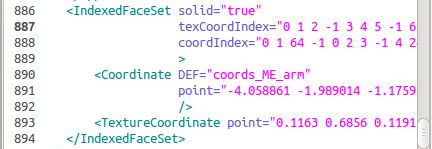
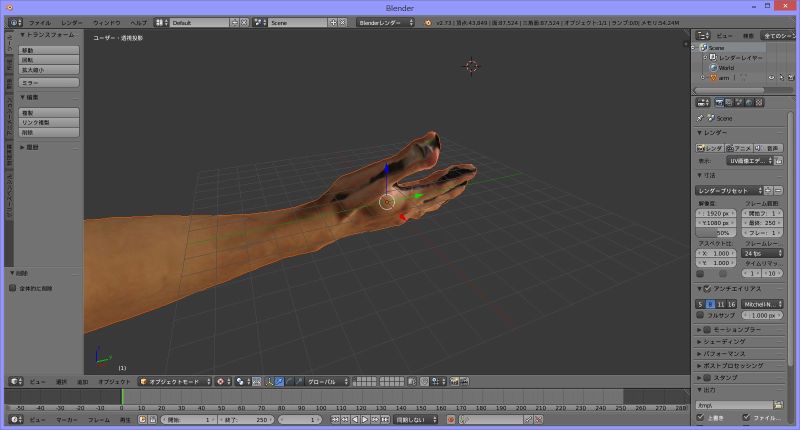
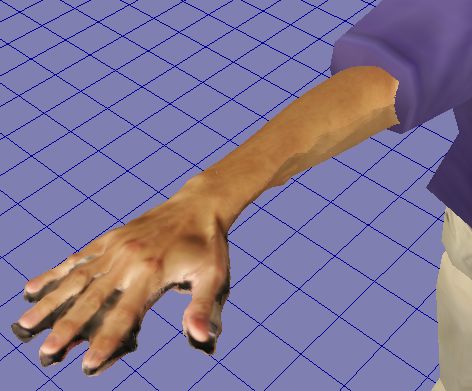
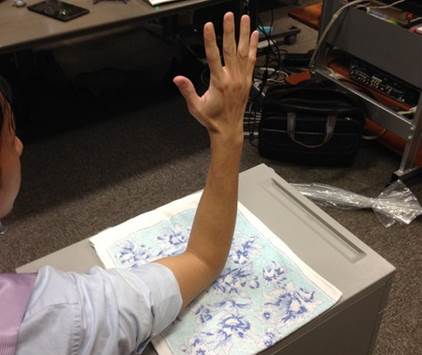
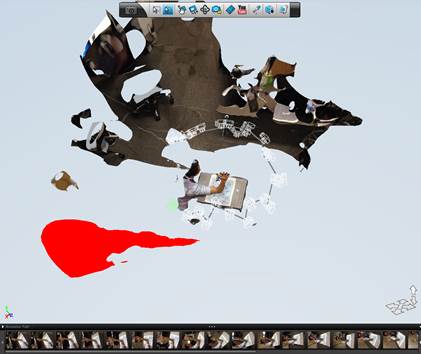
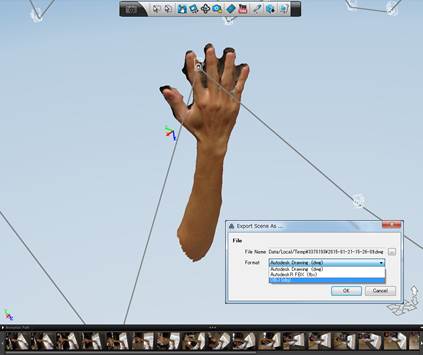
- 実世界のロボットの取り込み
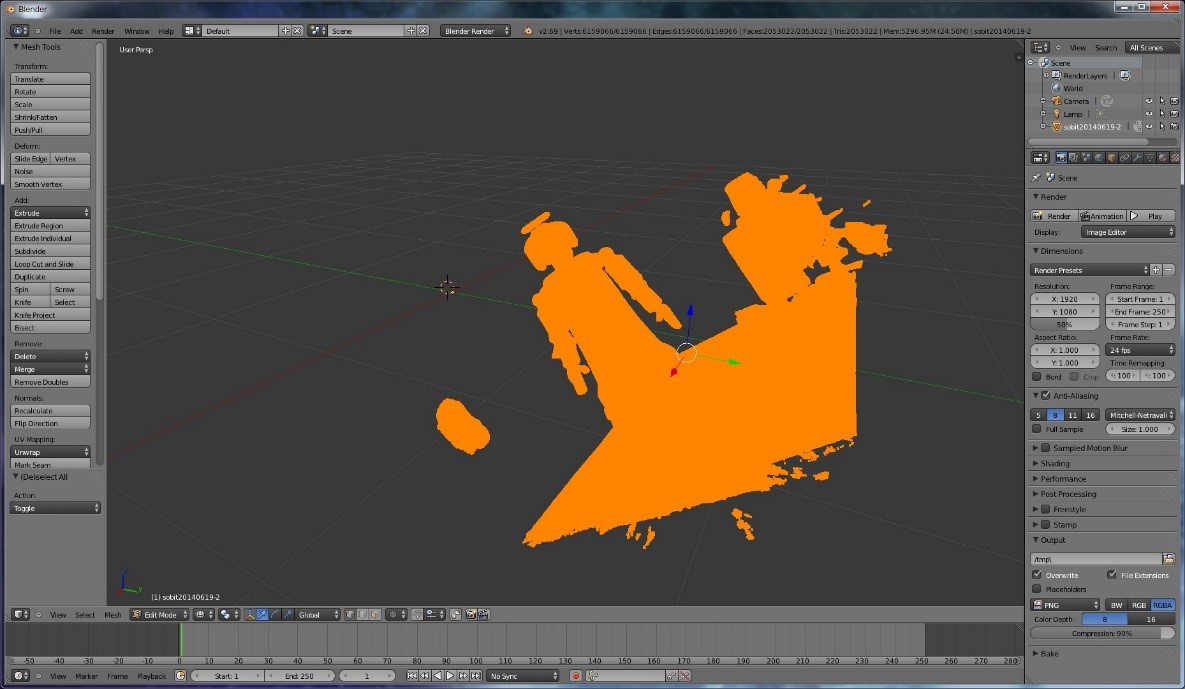
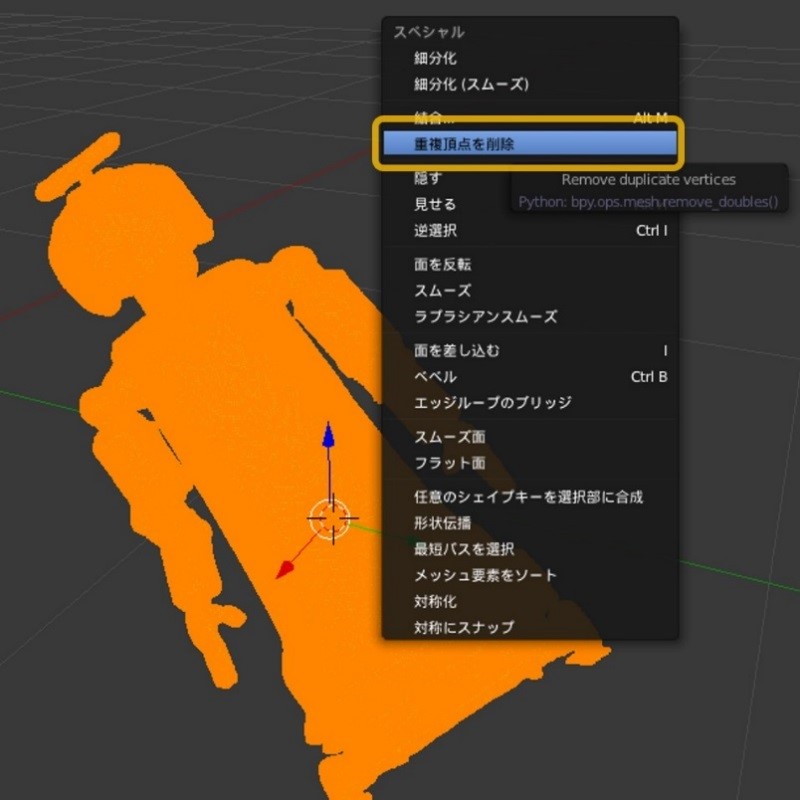
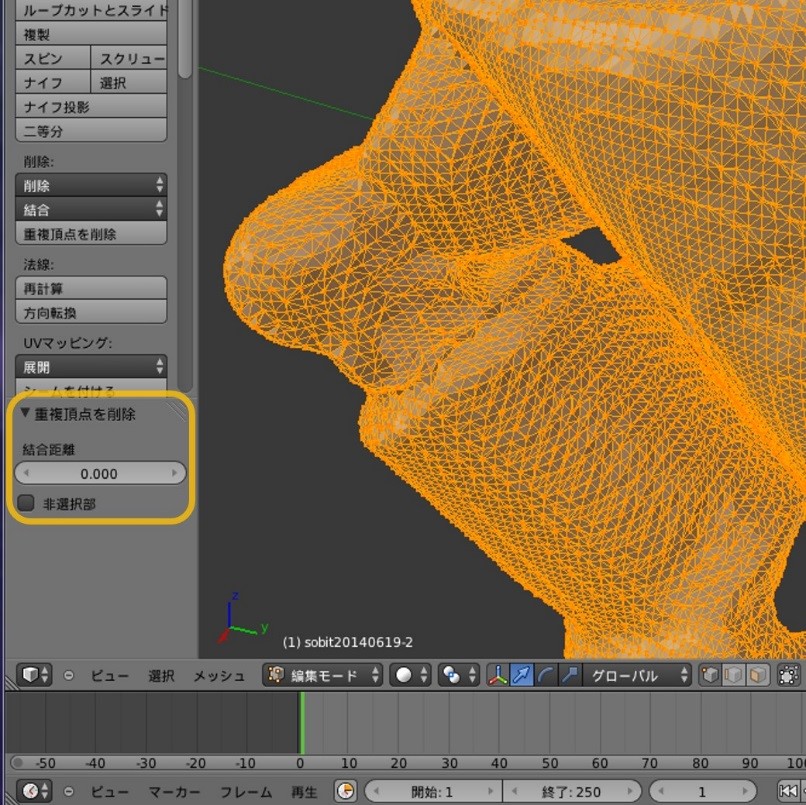
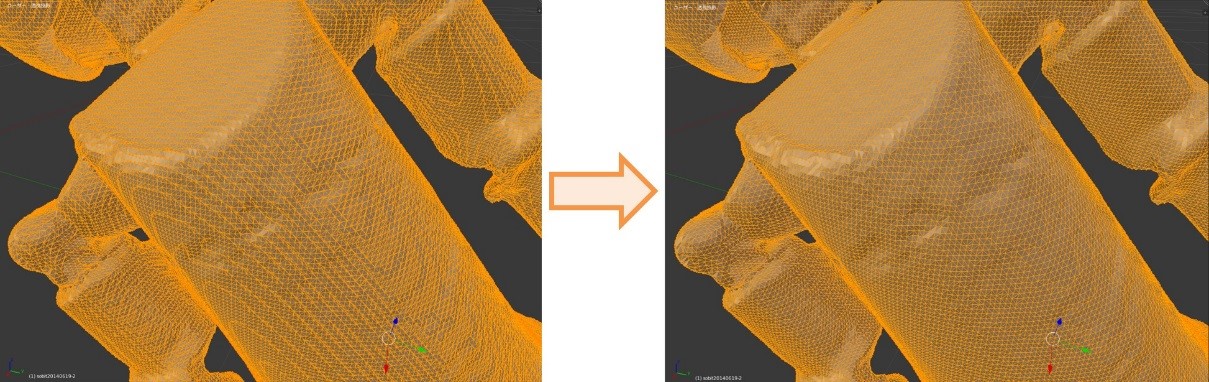
- 実世界の人・物の取り込み
- 物体を持つ動作(v120330, v1.4.8)
- 物体を持つ動作(v2.0系)
- 画像、距離センサデータ取得
- 眼球運動
- 眼球運動(v1.4.8)
- 第27回日本ロボット学会学術講演会
- 自作の形状ファイルの読み込み
- 自作の形状ファイルの読み込み(v1.4.8)
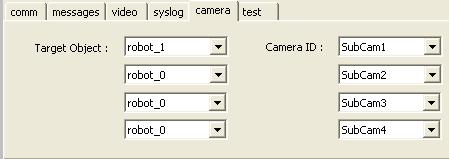
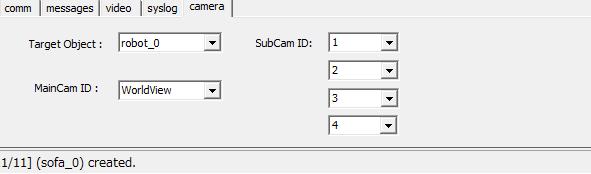
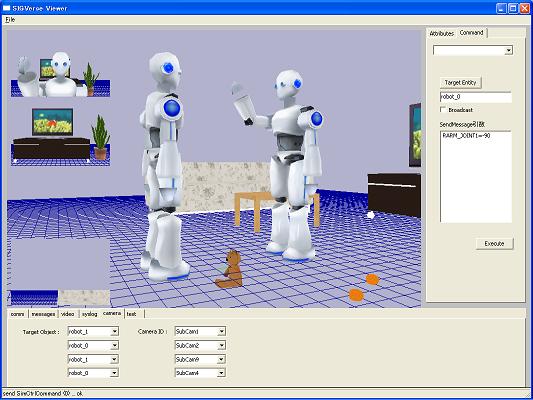
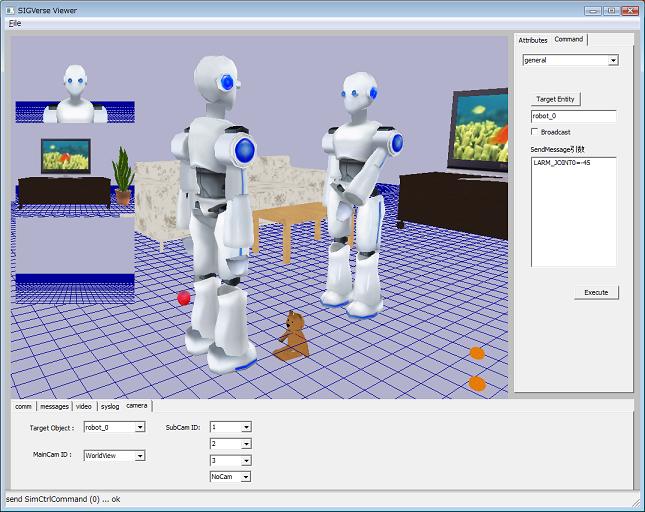
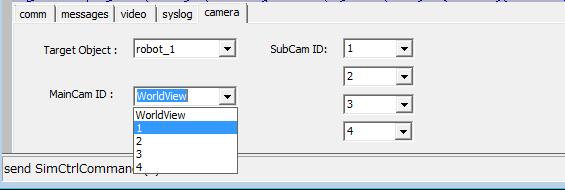
- 複数個のカメラ設置
- 視覚に関する操作
- 視覚に関する操作(v120330, v1.4.8)
- 視覚に関する操作(v2.0系)
- 距離センサ
- 距離センサ(v120330, v1.4.8)
- 距離センサ(v2.0系)
- 車輪移動ロボット(v120330 v1.4.8)
- 車輪移動ロボット_v2.1.0
- 音声認識
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}