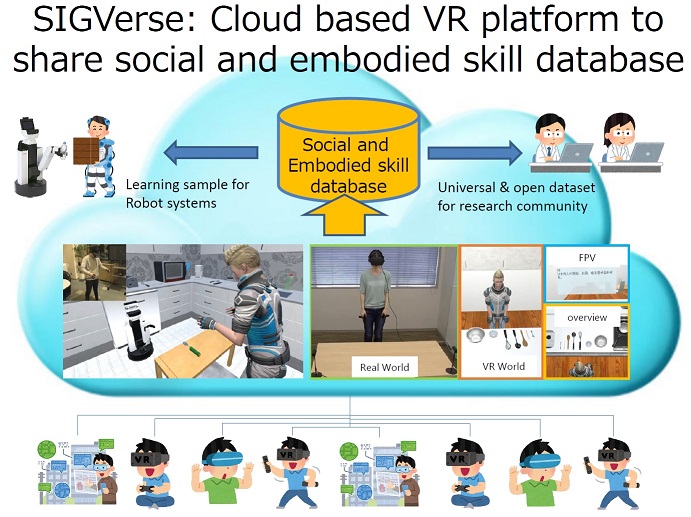
This tutorial is aimed to provide an opportunity to learn how to use the SIGVerse, which is a virtual reality (VR) based platform for human-robot interaction (HRI) research. Since collecting and storing a massive amount of data concerning multimodal interaction experiences is an important task concerning research on HRI, a cloud-based VR platform, named “SIGVerse,” which reduces costs of developing real robots and interaction experiments in the real world, is proposed. The system combines Unity and ROS frameworks to enable general users to login to an avatar in a robot simulator for the HRI experiments. The proposed architecture provides functionalities for constructing scalable 3D environments, embodied and social interaction via the Internet, compatible robot software, high-fidelity sensor feedback, and recording/playback of interaction. The following figure shows the concept of the SIGVerse platform.
This system is already used as an official software to organize a robot competition such as RoboCup@Home and World Robot Challenge to evaluate the effectiveness of the interaction between users and service robots in daily life environment. Developing actual service robots require huge time cost and budget cost; however, so many researchers and students can start up the research on HRI using service robot with our system. As well as the ROS middle can reduce the development cost of robot software, the SIGVerse has a great potential to accelerate the research on HRI.
If you bring your laptop PC, this workshop would be more fruitful for you with installing and testing the software. Since the power strips are limited in the convention venue, please charge your laptop before the tutorial and the organizers recommend carrying your own power strip.
This tutorial is supported by RSJ (Robotics Society of Japan)
Site admin: inamura
PukiWiki 1.5.0 Copyright © 2001-2006 PukiWiki Developers Team. License is GPL.